SURF算法(Speeded Up Robust Features)

1 SURF: Speeded Up Robust Features
In this section, the SURF detector-descriptor scheme is discussed in detail. First the
algorithm is analysed from a theoretical standpoint to provide a detailed overview of how
and why it works. Next the design and development choices for the implementation of
the library are discussed and justified. During the implementation of the library, it was
found that some of the finer details of the algorithm had been omitted or overlooked,
so Section 1.5 serves to make clear the concepts which are not explicitly defined in the
SURF paper [1].
1.1 Integral Images
Much of the performance increase in SURF can be attributed to the use of an intermediate
image representation known as the “Integral Image” [18]. The integral image is computed
rapidly from an input image and is used to speed up the calculation of any upright
rectangular area. Given an input image I and a point (x, y) the integral image I
P
is
calculated by the sum of the values between the point and the origin. Formally this can
be defined by the formula:
I
P
(x, y) =
i≤x
X
i=0
j≤y
X
j=0
I(x, y) (1)
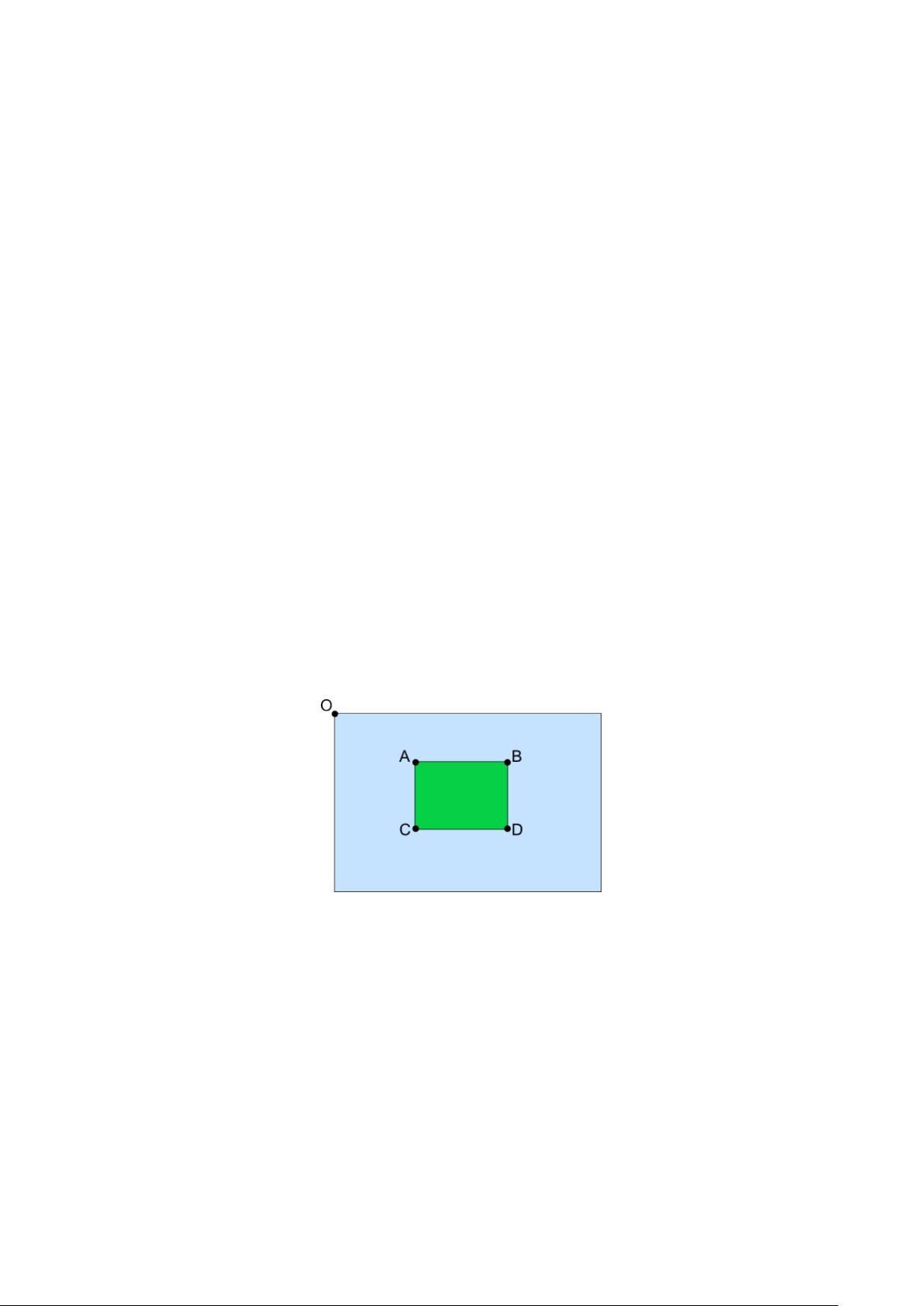
Figure 1: Area computation using integral images
Using the integral image, the task of calculating the area of an upright rectangular
region is reduced four operations. If we consider a rectangle bounded by vertices A, B,
C and D as in Figure 1, the sum of pixel intensities is calculated by:
X
= A + D − (C + B) (2)
Since computation time is invariant to change in size this approach is particularly useful

剩余23页未读,继续阅读
资源评论

 shcnxjy2012-03-20应该是一份关于SURF算法的英文报告,很详细!
shcnxjy2012-03-20应该是一份关于SURF算法的英文报告,很详细!

「已注销」
- 粉丝: 13
- 资源: 6









最新资源
- 黑苹果OC引导-0.9.1
- Redis 服务等过期策略和内存淘汰策略解析
- debian配置FTP服务
- 基于Matlab和CPLEX的2变量机组组合调度程序(注释完全,可直接运行)(文档加Matlab源码)
- 基于TMS320F2812设计复合频率信号频率计AD09硬件(原理图+PCB )+CCS软件源码+详细设计文档资料.zip
- MultivariateAnalysis(目标规划、多元分析与插值的相关例子)(注释完全,可直接运行)(文档加Matlab源码)
- 黑苹果OC引导-0.9.2
- 数据库实验-王珊.doc
- unity读取excel工具 使用3.5即可
- Matplotlib 是一个 Python 的绘图库 Matplotlib 绘图指南与功能介绍.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


