


Rev.1.00
发行:2006 年 2 月 20 日
CAN 入门书
www.renesas.com
Guide
RCJ05B0027-0100
瑞萨科技

应用手册
RCJ05B0027-0100/Rev.1.00 2006.02 Page 1 of 48
CAN 入门书
1. 概要
本资料是面向 CAN 总线初学者的 CAN 入门书。对 CAN 是什么、CAN 的特征、标准规格下的位置分布等、
CAN 的概要及 CAN 的协议进行了说明。
2. 使用注意事项
本资料对博世(BOSCH)公司所提出的 CAN 概要及协议进行了归纳,可作为实际应用中的参考资料。对于
具有 CAN 功能的产品不承担任何责任。
目录
1. 概要 ................................................................................................................................................... 1
2. 使用注意事项..................................................................................................................................... 1
3. CAN 是什么?.................................................................................................................................... 2
3.1 CAN 的应用示例................................................................................................................................3
3.2 总线拓扑图 ........................................................................................................................................ 4
4. CAN 的特点 ....................................................................................................................................... 5
5. 错误 ................................................................................................................................................... 6
5.1 错误状态的种类 ................................................................................................................................. 6
5.2 错误计数值 ........................................................................................................................................ 8
6. CAN 协议的基本概念......................................................................................................................... 9
7. CAN 协议及标准规格....................................................................................................................... 12
7.1 ISO 标准化的 CAN 协议 .................................................................................................................. 12
7.2 ISO11898 和 ISO11519-2 的不同点 ................................................................................................ 13
7.3 CAN 和标准规格.............................................................................................................................. 17
8. CAN 协议......................................................................................................................................... 18
8.1 帧的种类 .......................................................................................................................................... 18
8.2 数据帧.............................................................................................................................................. 21
8.3 遥控帧.............................................................................................................................................. 28
8.4 错误帧.............................................................................................................................................. 30
8.5 过载帧.............................................................................................................................................. 31
8.6 帧间隔.............................................................................................................................................. 32
8.7 优先级的决定................................................................................................................................... 33
8.8 位填充.............................................................................................................................................. 36
8.9 错误的种类 ...................................................................................................................................... 37
8.10 错误帧的输出................................................................................................................................... 39
8.11 位时序.............................................................................................................................................. 40
8.12 取得同步的方法 ...............................................................................................................................42
8.13 硬件同步 .......................................................................................................................................... 43
8.14 再同步.............................................................................................................................................. 44
8.15 调整同步的规则 ...............................................................................................................................45
应用手册
RCJ05B0027-0100/Rev.1.00 2006.02 Page 2 of 48
3. CAN 是什么?
CAN 是 Controller Area Network 的缩写(以下称为 CAN),是 ISO
*1
国际标准化的串行通信协议。
在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统
被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很
多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个 LAN,进行大量数据的高速通信”的需
要,1986 年德国电气商博世公司开发出面向汽车的 CAN 通信协议。此后,CAN 通过 ISO11898 及 ISO11519 进
行了标准化,现在在欧洲已是汽车网络的标准协议。
现在,CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。
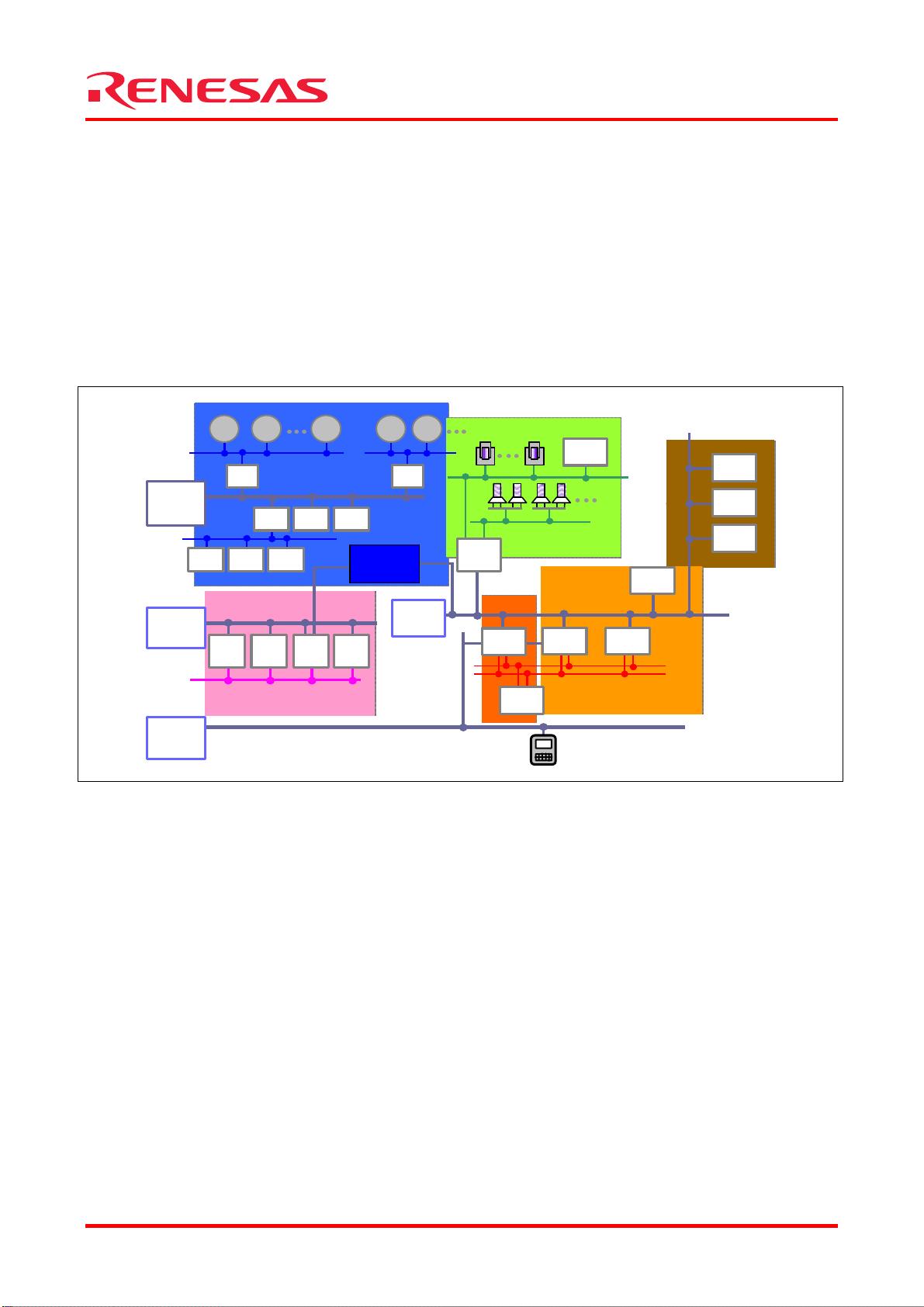
图 1 是车载网络的构想示意图。CAN 等通信协议的开发,使多种 LAN 通过网关进行数据交换得以实现。
CAN
〜
125 kbps
CAN
125kbps
CAN
500kbps
马达
马达
空调
子网
●
LIN 2.4〜19.2kbps
仪表板
遥控门
锁
车身 部
信息部
●MOST
●1394
引爆管
传感 器
安全部
子网
●
Safe-
by
-Wire
(150kbps)
车门
制动
子网
●
FlexRay
*
2
(5Mbps)
胎压
故障诊断部
●
CAN(规格 )
诊断工具
网关
开关 开关
转向
发动机・
传动部
自动变
速箱
CAN
500kbps
前大灯 窗电动 组合灯
自适应
前灯
音视频
MD/CD
碟盒
底盘部
白线检测
雷达
ITS部
发动机
交通信
息导航
马达
电子防
盗系统
气囊控制
乘客检测
自适应
巡航
图 1. 车载网络构想
【注】 *1 ISO: International Organization for Standardization (国际标准化组织)
*2 FlexRay
TM
为戴姆勒克莱斯勒公司注册商标。
应用手册
RCJ05B0027-0100/Rev.1.00 2006.02 Page 3 of 48
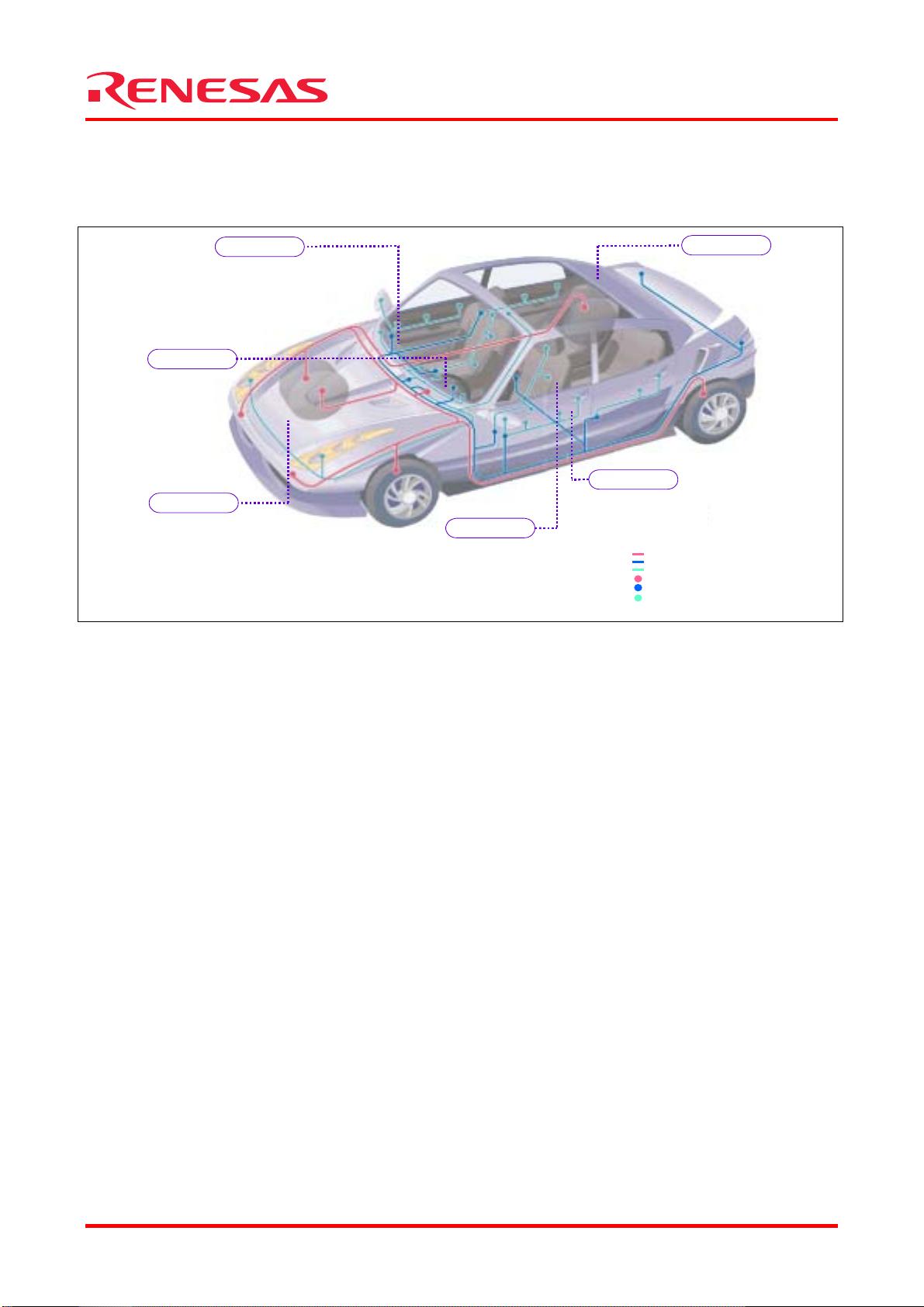
3.1 CAN 的应用示例
图 2 为 CAN 的应用示例
Climate Control
Cluster
Engine
Seat
Door
Roof
Motor control
Center unit
Cluster control
Wiper control
Winker control
Car audio
Light control
Column switch
Automobile phone
Sensor
Motor control
Passenger detection
Switch control
Side mirror
Door lock
Power window
Door switch
Rain sensor
Sunroof
: CAN bus: 500kbps
: CAN bus: 125kbps
: LIN bus: 19.2kbps/9.6kbps
: CAN unit / LIN master units
: CAN unit / LIN master units
: LIN slave unit
图 2. CAN 的应用示例
应用手册
RCJ05B0027-0100/Rev.1.00 2006.02 Page 4 of 48
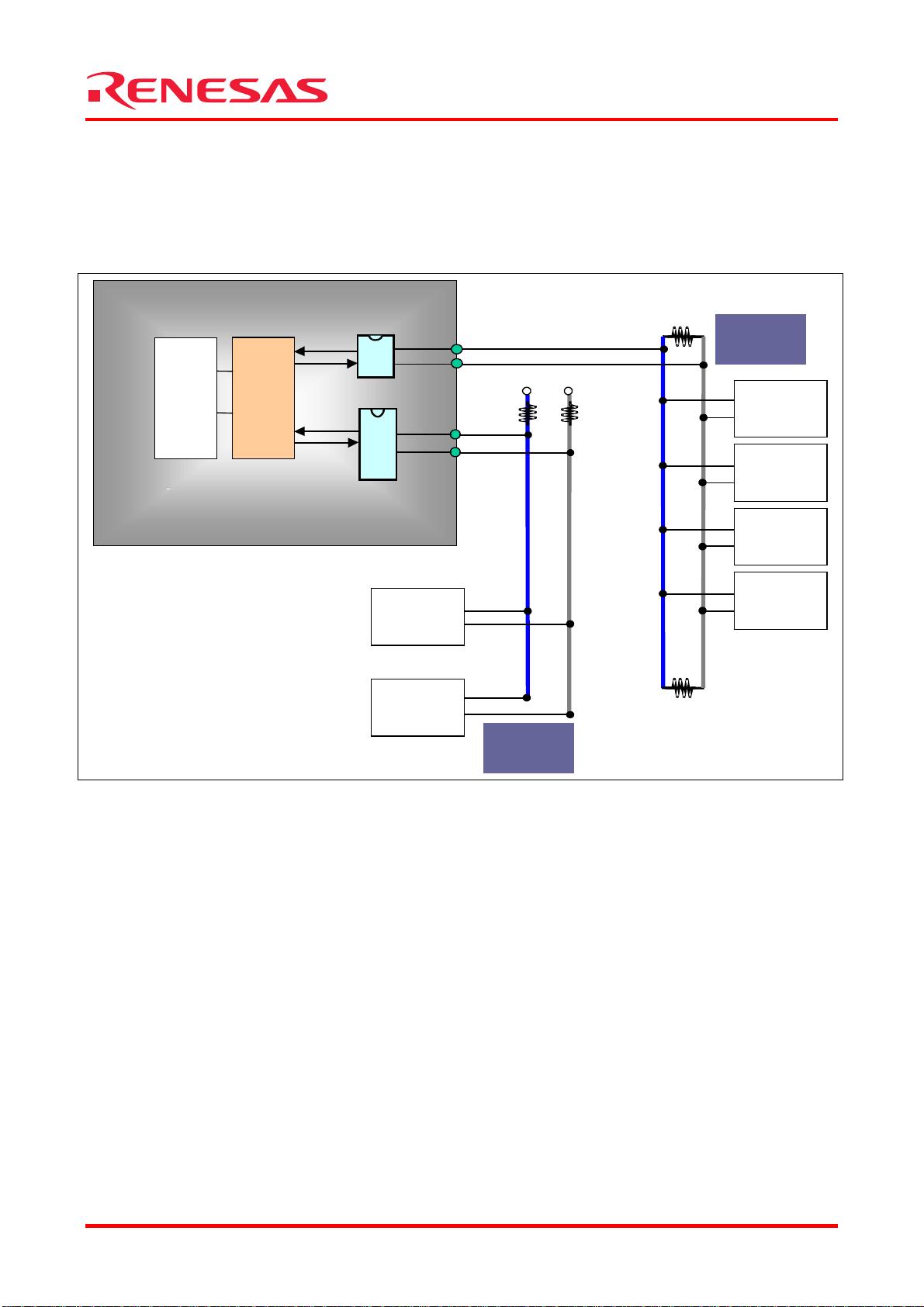
3.2 总线拓扑图
CAN 控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发
送方通过使总线电平发生变化,将消息发送给接收方。
图 3 是 CAN 的连接示意图
…
收发器
收发器
CAN H
CAN L
RxD
TxD
RxD
TxD
CAN H
CAN L
ABS
SAS
CAN
Controller
CPU
ETM
ECM
DDM
PDM
…
RxD
TxD
CAN
125kbps
CAN
500kbps
图 3. CAN 连接图













