Structure Inference Net: Object Detection Using Scene-Level Context and
Instance-Level Relationships
Yong Liu
1,2
, Ruiping Wang
1,2,3
, Shiguang Shan
1,2,3
, Xilin Chen
1,2,3
1
Key Laboratory of Intelligent Information Processing of Chinese Academy of Sciences (CAS),
Institute of Computing Technology, CAS, Beijing, 100190, China
2
University of Chinese Academy of Sciences, Beijing, 100049, China
3
Cooperative Medianet Innovation Center, China
yong.liu@vipl.ict.ac.cn, {wangruiping, sgshan, xlchen}@ict.ac.cn
Abstract
Context is important for accurate visual recognition. In
this work we propose an object detection algorithm that not
only considers object visual appearance, but also makes use
of two kinds of context including scene contextual informa-
tion and object relationships within a single image. There-
fore, object detection is regarded as both a cognition prob-
lem and a reasoning problem when leveraging these struc-
tured information. Specifically, this paper formulates object
detection as a problem of graph structure inference, where
given an image the objects are treated as nodes in a graph
and relationships between the objects are modeled as edges
in such graph. To this end, we present a so-called Struc-
ture Inference Network (SIN), a detector that incorporates
into a typical detection framework (e.g. Faster R-CNN) with
a graphical model which aims to infer object state. Com-
prehensive experiments on PASCAL VOC and MS COCO
datasets indicate that scene context and object relationships
truly improve the performance of object detection with more
desirable and reasonable outputs.
1. Introduction
Object detection is one of the fundamental computer vi-
sion problems. Recently, this topic has enjoyed a series of
breakthroughs thanks to the advances of deep learning, and
it is observed that prevalent object detectors predominantly
regard detection as a problem of classifying candidate boxes
[
16, 15, 33, 24, 7]. While most of them have achieved im-
pressive performance in a number of detection benchmarks,
they only focus on local information near an object’s region
of interest within the image. Usually an image contains rich
contextual information including scene context and object
relationships [
10]. Ignoring these information inevitably
places constraints on the accuracy of objects detected [
3].
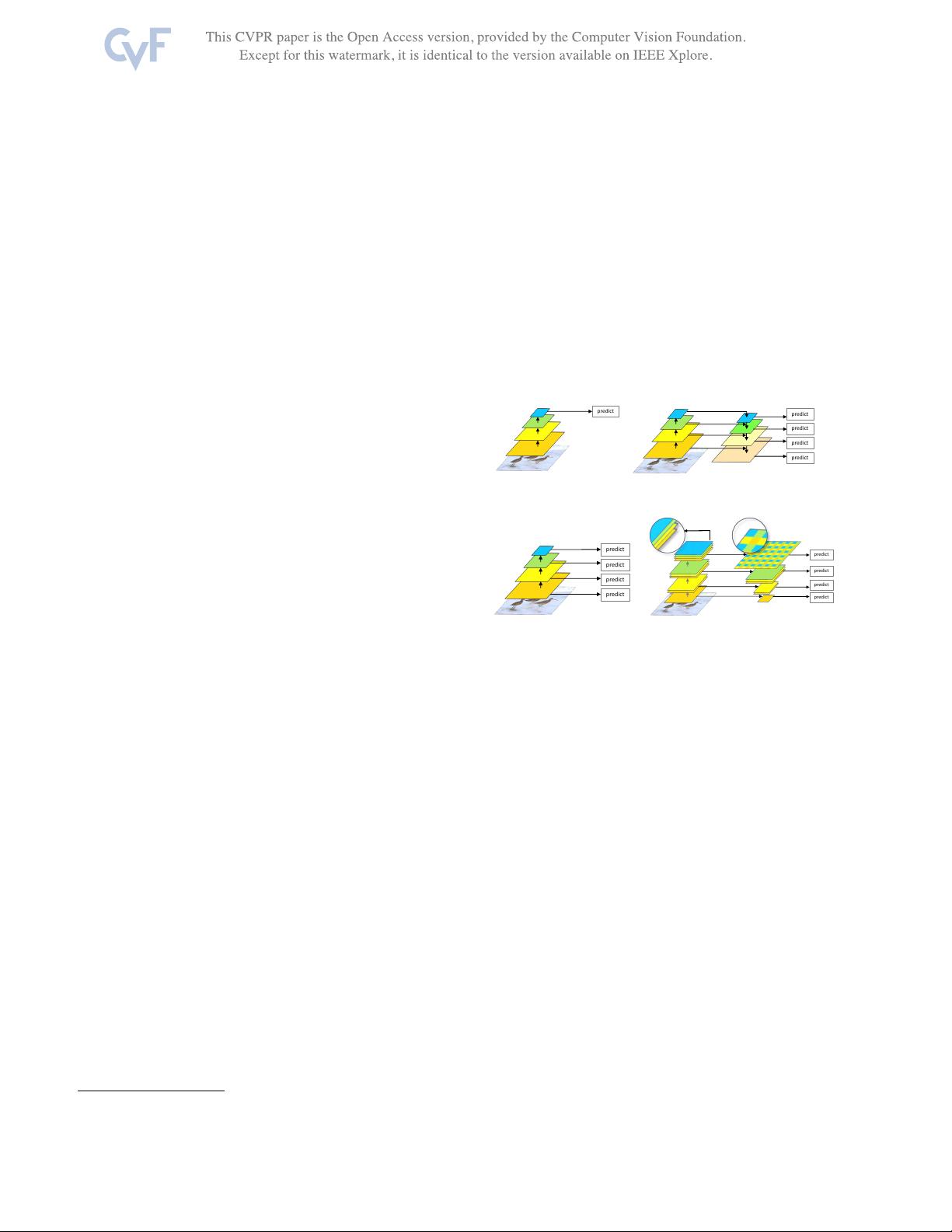
To illustrate such constraints, considering the practical
(a) (b)
Figure 1. Some Typical Detection Errors of Faster R-CNN. (a)
Some boats are mislabeled as cars on PASCAL VOC [
12]. (b) The
mouse is undetected on MS COCO [26].
examples in Fig.
1, detected by Faster R-CNN [33]. In
the first case where is a river field, some of the boats are
mislabeled as cars, since the detector only concentrates on
object’s visual appearance. If the scene information in this
image was taken into account, such banana skin could have
been easily avoided. In the second case, though a laptop and
person have been detected as expected, no further object is
found any more. It is quite common that mouse and laptop
usually co-occur within a single image. If using object rela-
tive position and co-occurrence pattern, more objects within
the given image could be detected.
Many empirical studies [
10, 14, 19, 41, 30, 29, 36] have
suggested that recognition algorithms can be improved by
proper modeling of context. To handle the problem above,
two types of contextual information model have been ex-
plored for detection [
4]. The first type incorporates con-
text around object or scene-level context [
3, 43, 37], and the
second models object-object relationships at instance-level
[
18, 4, 30]. While these two types of models capture com-
plementary contextual information, they can be combined
together to jointly help detection.
We are thus motivated to intuitively conjecture that vi-
sual concepts in most of natural images form an organism
with the key components of scene, objects and relation-
ships, and different objects in the scene are organized in a
6985