双足机器人及多舵机控制

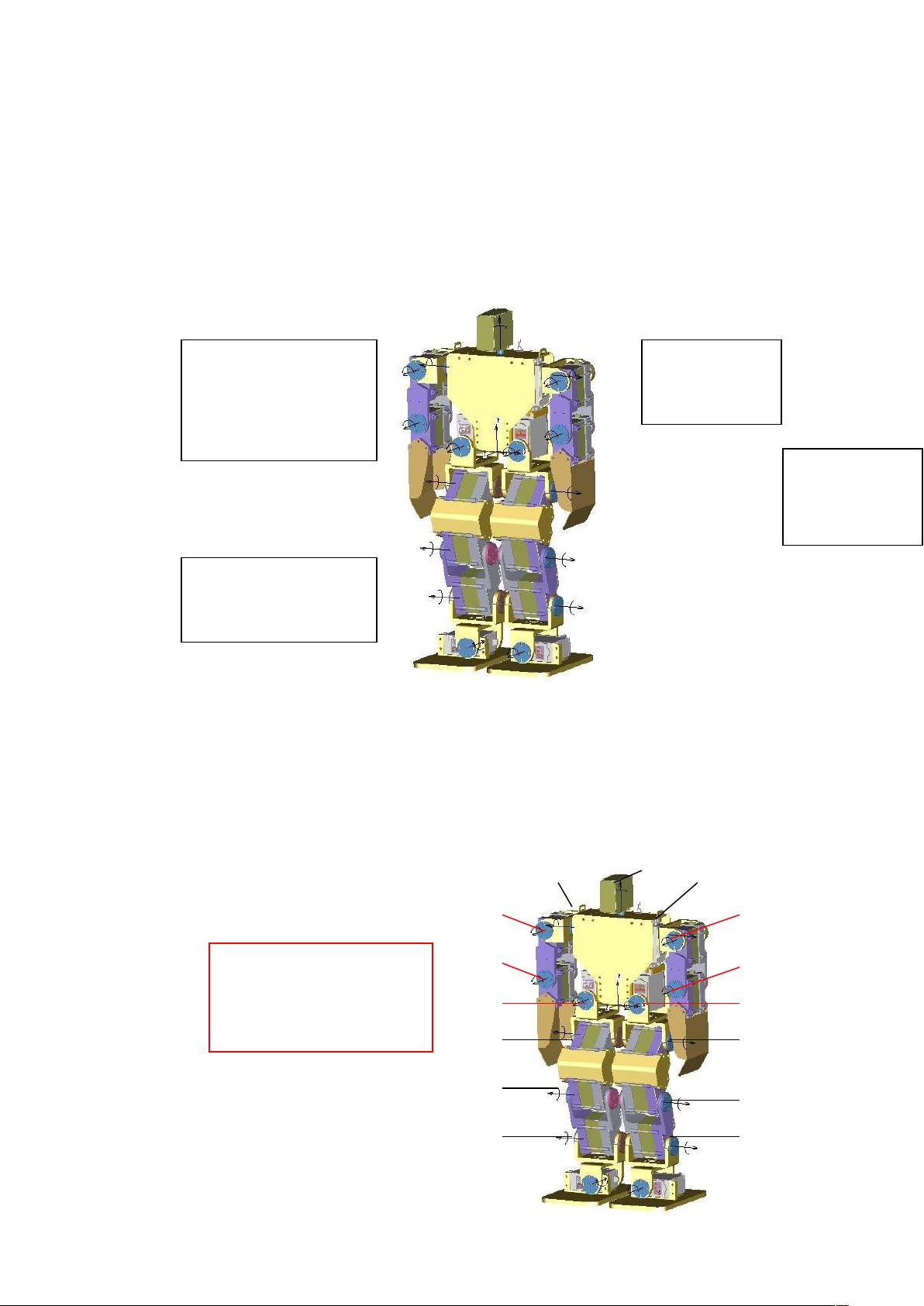
手臂----3×2 = 6
腿部----5×2 = 10
头部----1×1 = 1
总计自由度 = 17
图 为 HGR-3 人
形机器人除去胸
部件的示意图
图 中 机 器 人 的
17 个 自 由 度 ,
已经用矢量法标
出。
手臂舵机----金属齿轮
腿部舵机----金属齿轮
头部舵机----塑料齿轮
一、自由度
1. 机器人自由度分配
2. 机器人自由度编号
一般的,我们进行双足机器人研究时总是先从双腿入手,所以将腿部关节
自由度定为 1—10。
汉库公司机器人出厂自由度设置如下:
Z1
注意:机械系统中的自由度
编号与电子系统中的编号统
一,并能够与机器人操作软
件相对应。
Z2
Z3
Z4
Z5
Z6
P 6
1PEEDE
P 5
EE
P 3
P 4
P1P3
P5
P6
P8
P7
17 Z7Z8


剩余12页未读,继续阅读
资源评论

 郑华滨2023-07-27尽管这份文件在某些方面还有待完善,但它为双足机器人及多舵机控制领域的研究提供了很好的参考资料。
郑华滨2023-07-27尽管这份文件在某些方面还有待完善,但它为双足机器人及多舵机控制领域的研究提供了很好的参考资料。 鲸阮2023-07-27文中的实验结果与理论分析相吻合,证明了提出的方法的有效性。
鲸阮2023-07-27文中的实验结果与理论分析相吻合,证明了提出的方法的有效性。 陌陌的日记2023-07-27这份文件详细介绍了双足机器人及多舵机控制的原理和应用,非常实用。
陌陌的日记2023-07-27这份文件详细介绍了双足机器人及多舵机控制的原理和应用,非常实用。 西门镜湖2023-07-27文件中对于双足机器人的建模与控制方法进行了简明扼要的讲解,容易理解。
西门镜湖2023-07-27文件中对于双足机器人的建模与控制方法进行了简明扼要的讲解,容易理解。 深层动力2023-07-27然而,对于多舵机的具体控制策略,文件中的描述略显简单,需要进一步深入研究。
深层动力2023-07-27然而,对于多舵机的具体控制策略,文件中的描述略显简单,需要进一步深入研究。












