ABB机器人中文手册.pdf


ABB ENGINEERING (SHANG HAI) S4C IRB 基本操作培训手册
----------------------------------------------------------------------------------------------------------------
第 1页
1 介绍
本手册解释 ABB 机器人的基本操作、运行。
你为了理解其内容不需要任何先前的机器人经验。
手册被分为章,各章分别描述一个特别的工作任务和实现的方法。
各章互相间有一定联系。因此应该按他们在书中的顺序阅读。
借助此手册学习操作操作机器人是我们的目的,但是仅仅阅读此手册也应
该能帮助你理解机器人的基本的操作。
此手册依照标准的安装而写,具体根据系统的配置会有差异。
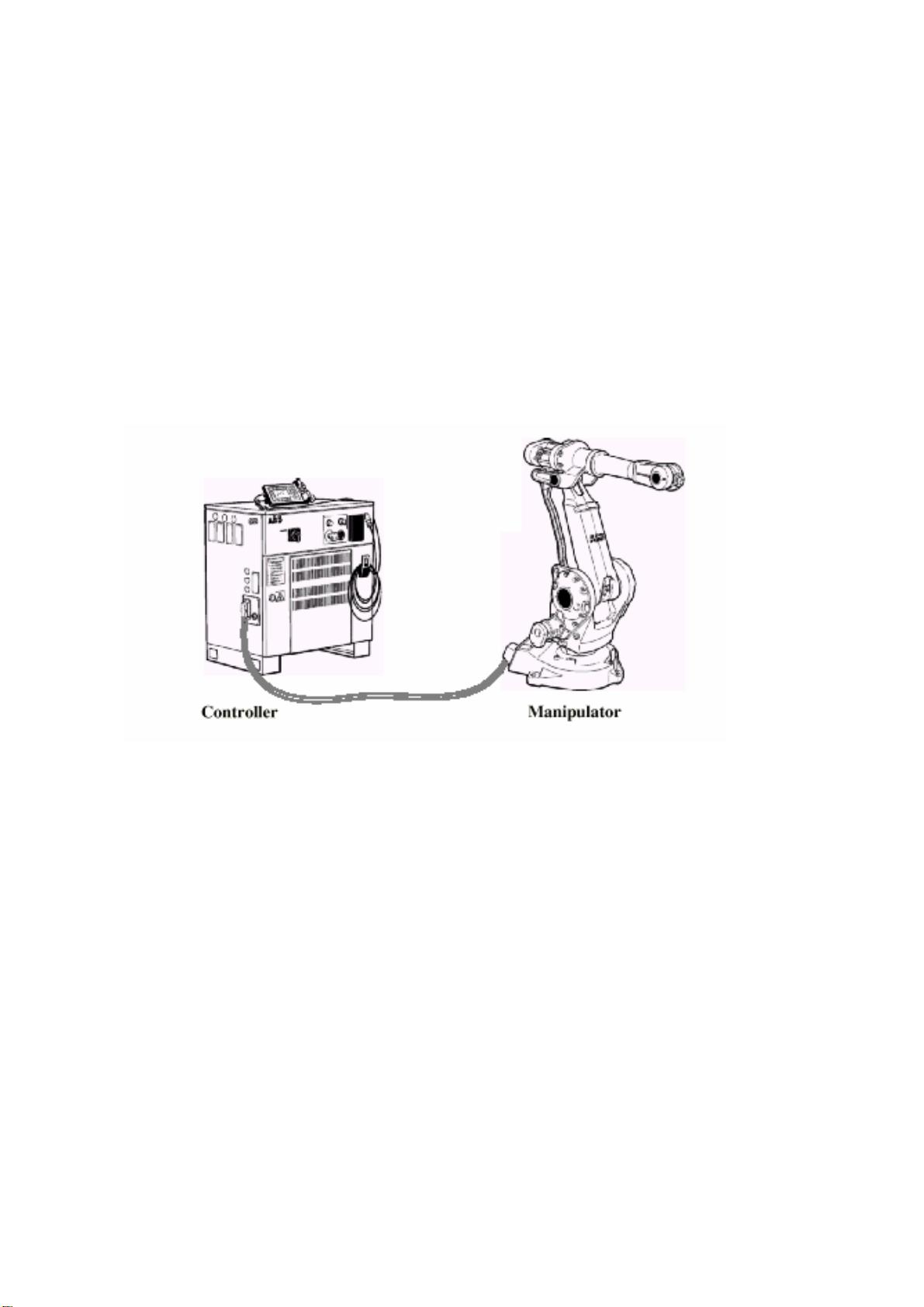
控制柜有两种型号。一种小,一种大。本手册选用小型号的控制柜表示。
大的控制柜的柜橱有和大的一个同样的操作面板,但是位于另一个位置。
请注意这手册仅仅描述实现通常的工作作业的某一种方法,如果你是经验
丰富的用户,可以有其他的方法。
其他的方法和更详细的信息看下列手册。
《使用指南》提供全部自动操纵功能的描述并详细描述程序设计语言。此
手册是操作员和程序编制员的参照手册。
《产品手册》提供安装、机器人故障定位等方面的信息。
如果你仅希望能运行程序,手动操作机器人、由软盘调入程序等,不必要
读 8-11 章。
2 系统安全及环境保护
机器人系统复杂而且危险性大,在训练期间里,或者任何别的操
作过程都必须注意安全。无论任何时间进入机器人周围的保护的
空间都可能导致严重的伤害。只有经过培训认证的人员才可以进
入该区域。请严格注意。
以下的安全守则必须遵守。
• 万一发生火灾,请使用二氧化炭灭火器。
• 急停开关(E-Stop)不允许被短接。
• 机器人处于自动模式时,不允许进入其运动所及的区域。
• 在任何情况下,不要使用原始盘,用复制盘。
• 搬运时,机器停止,机器人不应置物,应空机。

剩余50页未读,继续阅读
资源评论

 普通网友2023-07-26这份中文手册的内容简明扼要,可以快速找到需要的信息,省去了不必要的翻阅时间。
普通网友2023-07-26这份中文手册的内容简明扼要,可以快速找到需要的信息,省去了不必要的翻阅时间。 余青葭2023-07-26对于我这个机器人领域的新手来说,这本中文手册真的是相当友好和易读的资料。
余青葭2023-07-26对于我这个机器人领域的新手来说,这本中文手册真的是相当友好和易读的资料。 西西里的小裁缝2023-07-26这份中文手册对于了解ABB机器人非常有帮助,详细而实用。
西西里的小裁缝2023-07-26这份中文手册对于了解ABB机器人非常有帮助,详细而实用。 苗苗小姐2023-07-26阅读这本中文手册后,我对ABB机器人的操作有了更清晰的认识,能轻松上手使用。
苗苗小姐2023-07-26阅读这本中文手册后,我对ABB机器人的操作有了更清晰的认识,能轻松上手使用。 型爷2023-07-26这本中文手册的语言清晰明了,没有使用过多的技术术语,非常适合初学者。
型爷2023-07-26这本中文手册的语言清晰明了,没有使用过多的技术术语,非常适合初学者。












