ROS与navigation教程.pdf
需积分: 42 143 浏览量
2019-10-05
22:32:01
上传
评论 29
收藏 2.25MB PDF 举报

1
ROS
与
navigation
教程
说明:
介绍如何为机器人整合导航包,实现有效控制和自主导航等功能
目录:
ROS 与 navigation 教程-目录
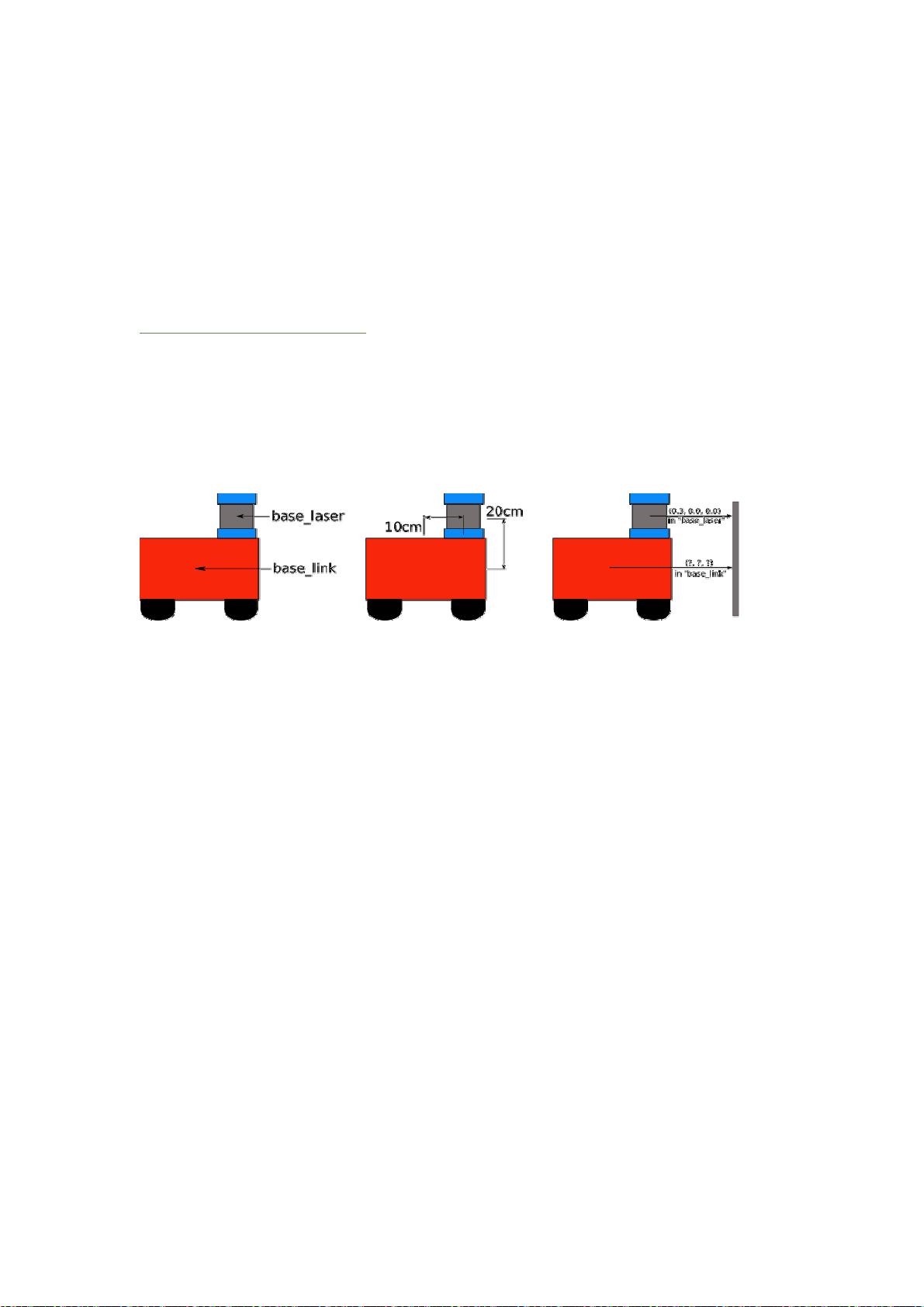
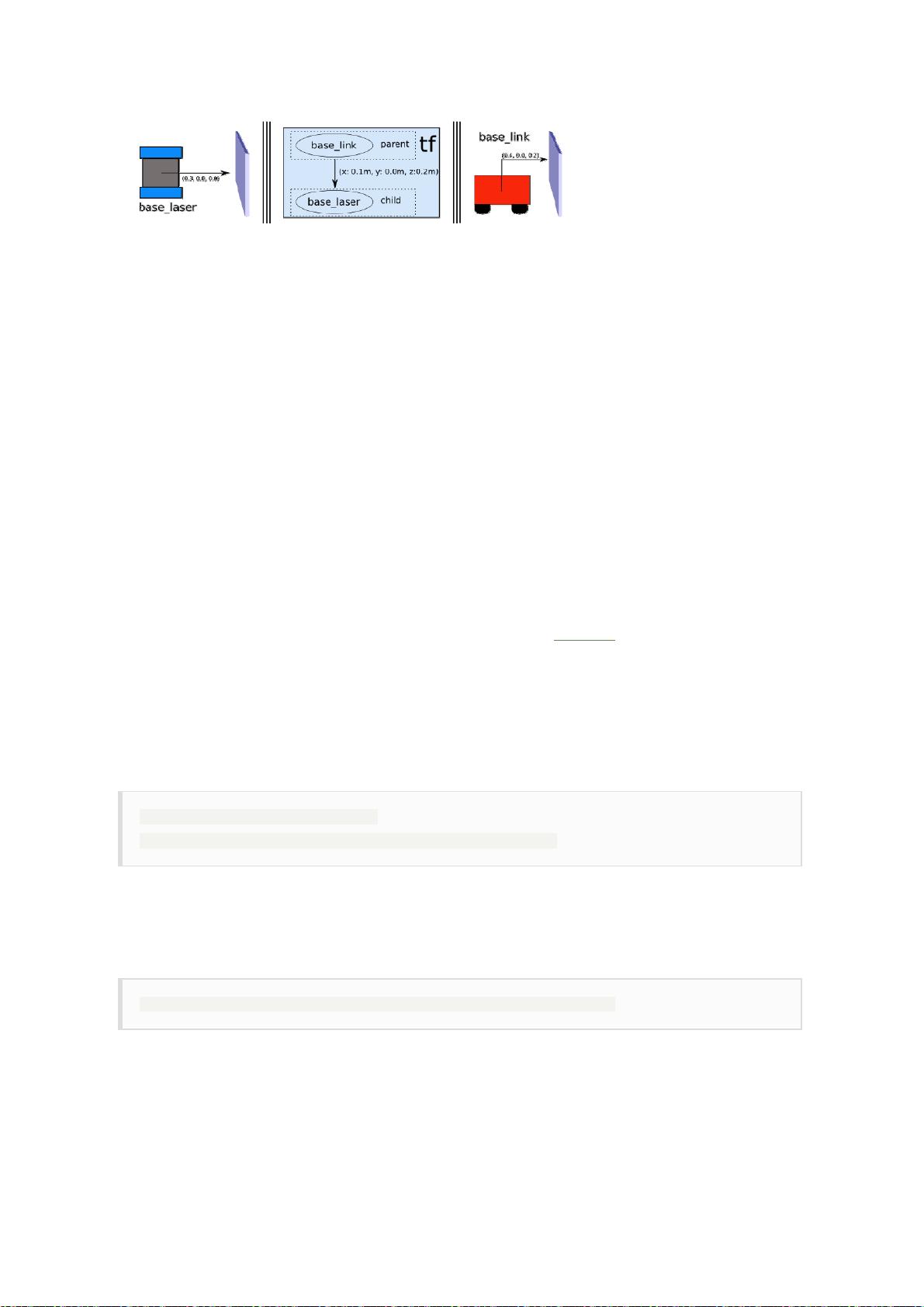
ROS 与 navigation 教程-设置机器人使用 TF
ROS 与 navigation 教程-基本导航调试指南
ROS 与 navigation 教程-安装和配置导航包
ROS 与 navigation 教程-结合 RVIZ 与导航包
ROS 与 navigation 教程-发布里程计消息
ROS 与 navigation 教程-发布传感器数据
ROS 与 navigation 教程-编写自定义全局路径规划
ROS 与 navigation 教程-stage 仿真
ROS 与 navigation 教程-示例-激光发布(C++)
ROS 与 navigation 教程-示例-里程发布(C++)
ROS 与 navigation 教程-示例-点云发布(C++)
ROS 与 navigation 教程-示例-机器人 TF 设置(C++)
ROS 与 navigation 教程-示例-导航目标设置(C++)
ROS 与 navigation 教程-turtlebot-整合导航包简明指南
ROS 与 navigation 教程-turtlebot-SLAM 地图构建
ROS 与 navigation 教程-turtlebot-现有地图的自主导航
ROS 与 navigation 教程-map_server 介绍
ROS 与 navigation 教程-move_base 介绍
ROS 与 navigation 教程-move_base_msgs 介绍
ROS 与 navigation 教程-fake_localization 介绍
ROS 与 navigation 教程-voel_grid 介绍
ROS 与 navigation 教程-global_planner 介绍
ROS 与 navigation 教程-base_local_planner 介绍
剩余153页未读,继续阅读






评论0
最新资源