For office use only
T1
T2
T3
T4
Team Control Number
55585
Problem Chosen
C
For office use only
F1
F2
F3
F4
2017
MCM/ICM
Summary Sheet
Highway Traffic Flow Model with Self-Driving Vehicles
Based on Cellular Automata
Summary
With the increasing lack of transportation capacity and the growth of self-driving vehicle(SDV)
industry, an evaluation should be made to find out the influence on traffic when more and more non-
self-driving-vehicles(NSDV) are replaced by SDVs while few studies were done on the interactions
between SDVs and NSDVs and the cooperations among SDVs themselves.
We choose cellular automata(CA) model to evaluate this problem after a careful study and com-
parison of different kinds of traffic flow models in the past few decades. In order to take the re-
lationships of SDVs and NSDVs into consideration, we improve the traditional CA model which
emphasizes on status and rules of changes, by redesigning these two factors. Before building a CA
model, discretization should be done first. By learning the average length, speed, acceleration of
running vehicles on highway and the reaction time of human beings, the size of a cell and the time
length of a turn are decided. After making assumptions and simplifying the problem, two inter-
related CA models are covered in this paper to simulate the changeable traffic: the Following Model
and the Multilane Traffic Model.
The Following Model is designed to simulate how a vehicle follows another in a single lane.
Rules for NSDVs and SDVs are different from each other: For an NSDV, the driver’s reaction time
and psychological characteristics are considered; For an SDV, the rules are based on the sharing of
information with other SDVs and the joint decision making. Specifically, we create a new conception
’SDV-Train’ to simulate the cooperations among SDVs.
The Multilane Traffic Model is based on the Following Model. In this model, besides following,
we try to find out when and how should a vehicle change a lane. Two main parameters are involved
in this model: Lane-Changing Motivation (LCM) and Lane-Changing Secuirty (LCS). LCM depends
on whether changing a lane can increase the speed and LCS shows the whether it is safe when lane-
changing. Only when both LCM and LCS are satisfied, may a vehicle change its lane. Details of
these two parameters vary between SDVs and NSDVs considering the huge difference between an
automatic control system and a human driver. A two-step turning method is specially made for this
model in correspondence with the real world.
After building and making improvements to the model, we write programs to simulate it and get
huge volumes of data. We analyze and visualize the data using Matlab, showing strong correlations
among three parameters: the average speed, the traffic flow and the percentage of the SDVs running
on the road. The increasing number of SDVs has great influence on the traffic flow which almost
triples when all the NSDVs are replaced by SDVs. Also, we find that a special lane for SDVs (SDV
Lane) should be built when the percentage reaches a certain level.
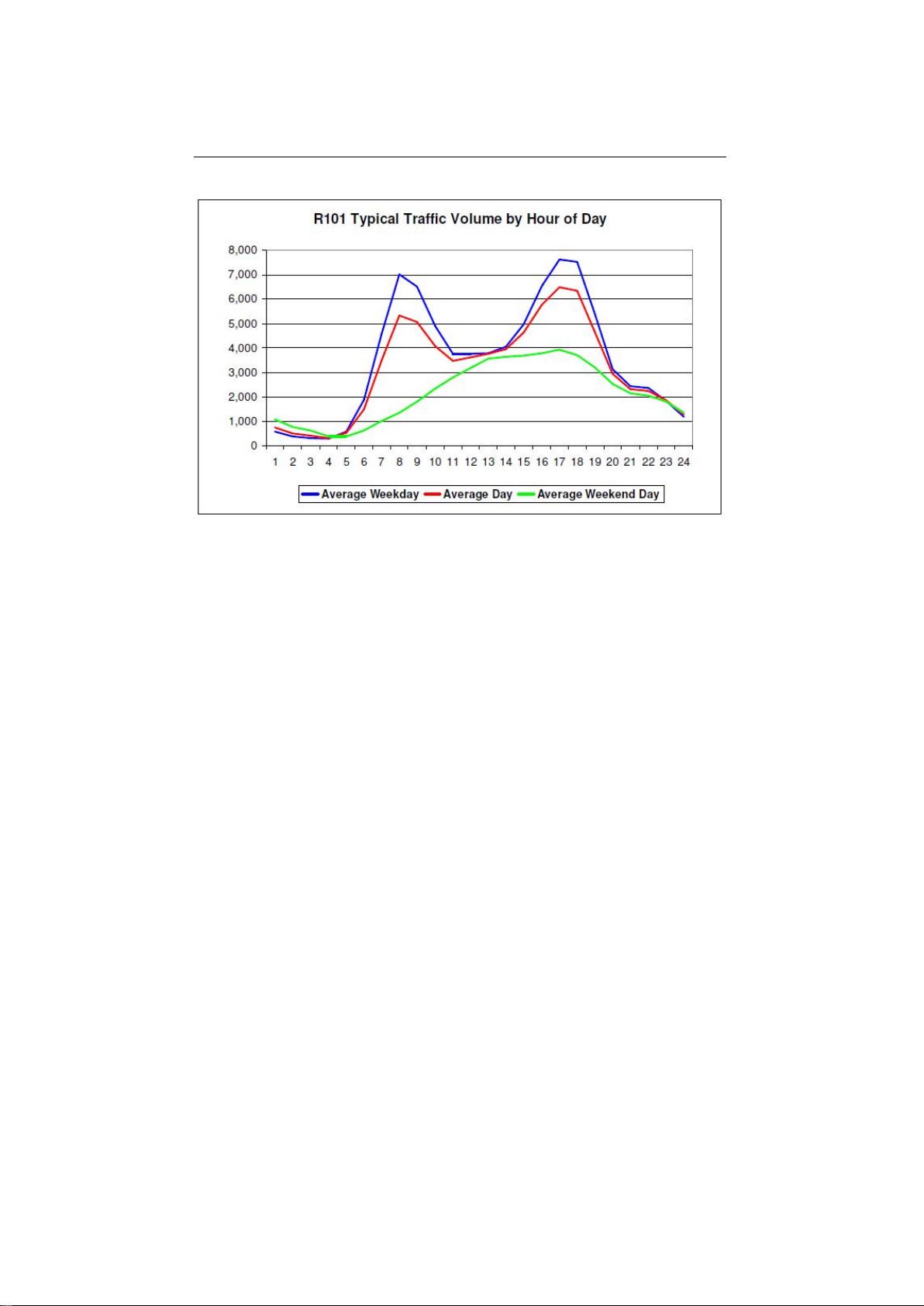
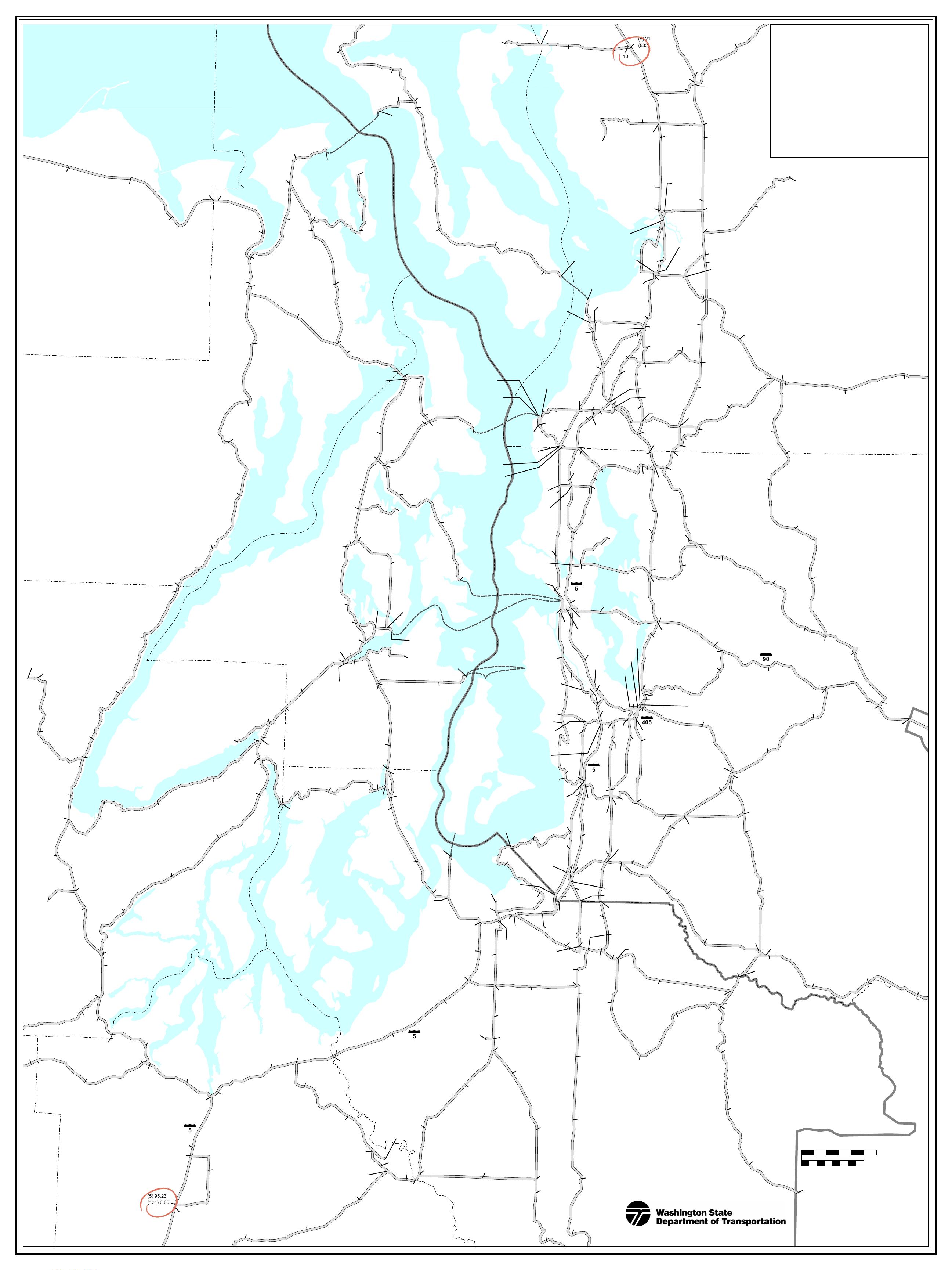
Based on the correlations we get in analysis, we apply our model to the Great Seattle area by
comparing the real data and the data we gain from simulations. We find that the lack of traffic
capacity in this area is huge. Although adding SDVs to the street can reduce this lack, it is not a cure.
We believe a comprehensive method should be applied in this area including setting a SDV Lane
and broadening highways in some particularly narrow parts.
Keywords: Traffic Flow Model; Self-Driving Vehicle; Cellular Automata
更多数学建模资料请关注微店店铺“数学建模学习交流”
https://k.weidian.com/RHO6PSpA