PSoC MCU实时操作系统.pdf
需积分: 10 63 浏览量
2009-09-28
17:20:54
上传
评论
收藏 150KB PDF 举报


应用手册 AN2046
PSoC MCU
实时操作系统
作者:Edward Nova
相关项目:是
相关部件系列:CY8C25xxxCY8C26xxx 、
CY8C27xxx、CY8C29xxx
摘要
本应用手册介绍PSoC可编程片上系统的实时操作系统(RTOS)。该系统可以用于各种应用,如:控制系统或
汽车业。
引言
PSoC可编程片上系统具有先进的嵌入式应用所需要的
丰富中断功能。
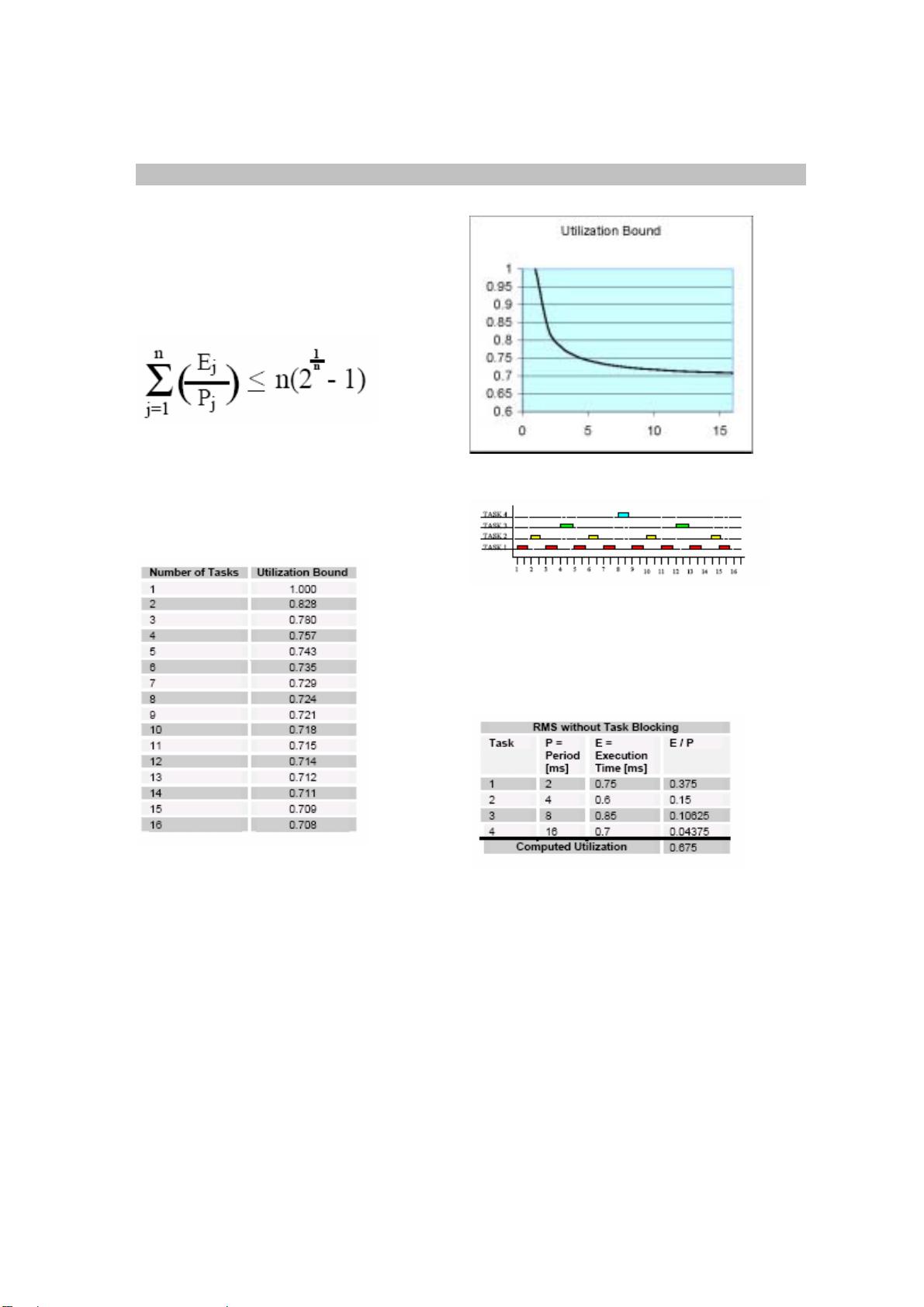
使用具有任务阻断方法的速率单调调度算法(RMS)实
现RTOS的内核是适用于PSoC的最佳方案。我们将介绍
实时多任务内核如何利用周期时隙方法在特定时隔运
行多个任务。周期时隙在此类实施中不会相互阻断。
只有采用中断服务才能够实现任务阻断。
这种实施极其简单,速度极快,而且不占用宝贵的CPU
时间和内存。该框架在扩展后还可以容纳更为复杂的
调度方法。
本项目的开发是基于PSoC Designer Version 3.10 Build
240。此应用程序采用Pod 28 Rev D.或E运行。
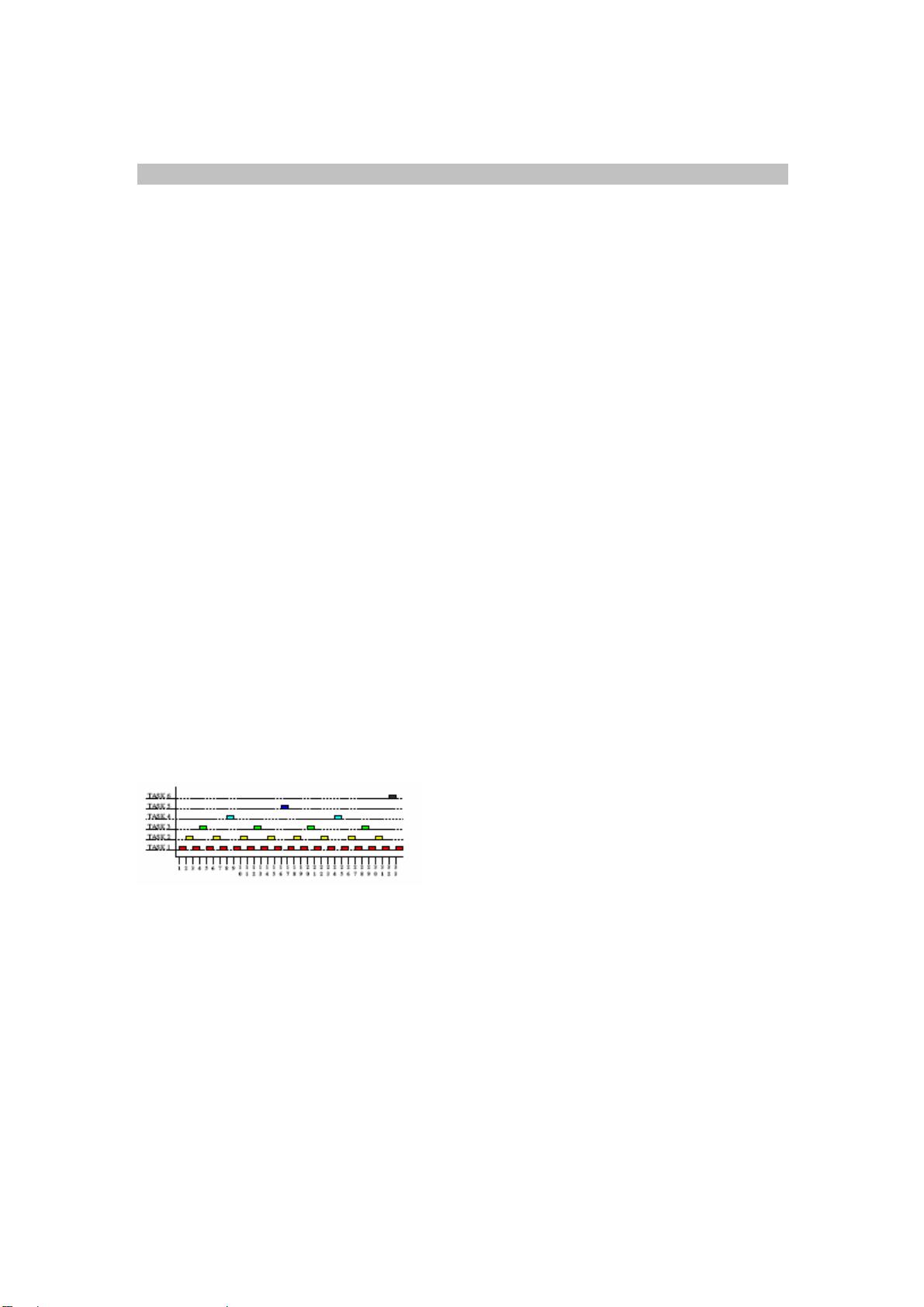
为了说明RTOS的多线程特性,我们在Pod(或Pup)的
8个LED之间进行切换。每个任务都具有相关的LED。
LED在任务时隙过程中闪烁。每个时隙的长度是上一
个时隙的两倍。
利用该RTOS使用户能够加快项目创建。另外,RTOS
的结构还有助于组织程序模块。
RTOS存在许多变体。本应用手册介绍的RTOS旨在用
于快速而又简便的实施。本作者将证明此RTOS不会占
用大量PSoC资源。下文将更详细地介绍其他众多优势。
实时操作系统
典型的操作系统包含以下部分或全部功能:
z 硬件接口
z 内存管理
z 任务调度
z 中断处理
z 文件管理
z 设备驱动器
z 组网
对于实时系统而言,在错误时间提供的正确解决方案
也是错误的解决方案。在对时间要求严格的系统中,
操作系统保证程序的关键部分及时得到处理并且满足
期限要求。
嵌入式系统建模
设计人员需要根据每种应用的情况选择合理的微控制
器。CPU速度、内存容量和输入/输出数量是选择微控
制器时必须考虑的问题。另一方面,设计人员还需要
选择如何满足软件需求。

剩余18页未读,继续阅读
资源评论














