目 录
摘 要 ...............................................................................................................................II
第 1 章 绪 论......................................................................................................................4
1.1 纠偏控制系统概述................................................................................................4
1.2 本课程设计的任务................................................................................................5
1.3 本课程设计原理....................................................................................................5
1.3.1 ADS 开发环境简介.......................................................................................5
1.3.2 PID 控制算法简介.......................................................................................5
1.3.3 JTAG 调试口简介.........................................................................................5
第 2 章 实验装置及内容描述..............................................................................................6
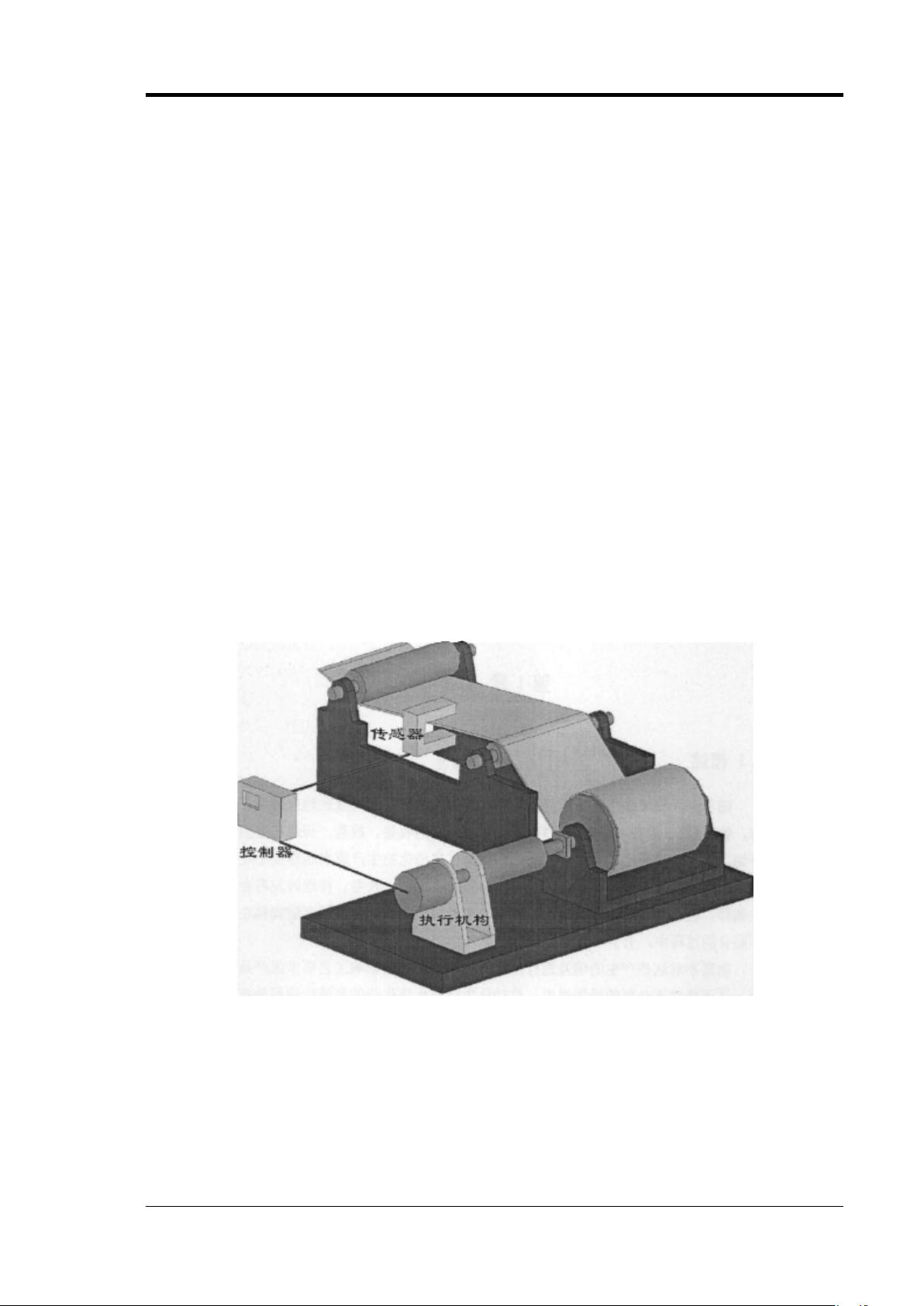
2.1 纠偏系统 .................................................................................................................6
2.1.1 传感器...........................................................................................................6
2.1.2 纠偏控制器...................................................................................................7
2.1.3 执行机构......................................................................................................7
2.2 纠偏控制 DEMO 及调试装置....................................................................................8
第三章 设计代码..................................................................................................................9
3.1 设计架构..................................................................................................................9
3.2 源代码......................................................................................................................9
第四章 问题解决................................................................................................................19
第五章 心得体会................................................................................................................19
附录:实验过程照片..........................................................................................................20