一种基于尺寸均匀的雅可比矩阵的三自由度并联机械手.docx
版权申诉
16 浏览量
2022-07-12
02:29:50
上传
评论
收藏 852KB DOCX 举报

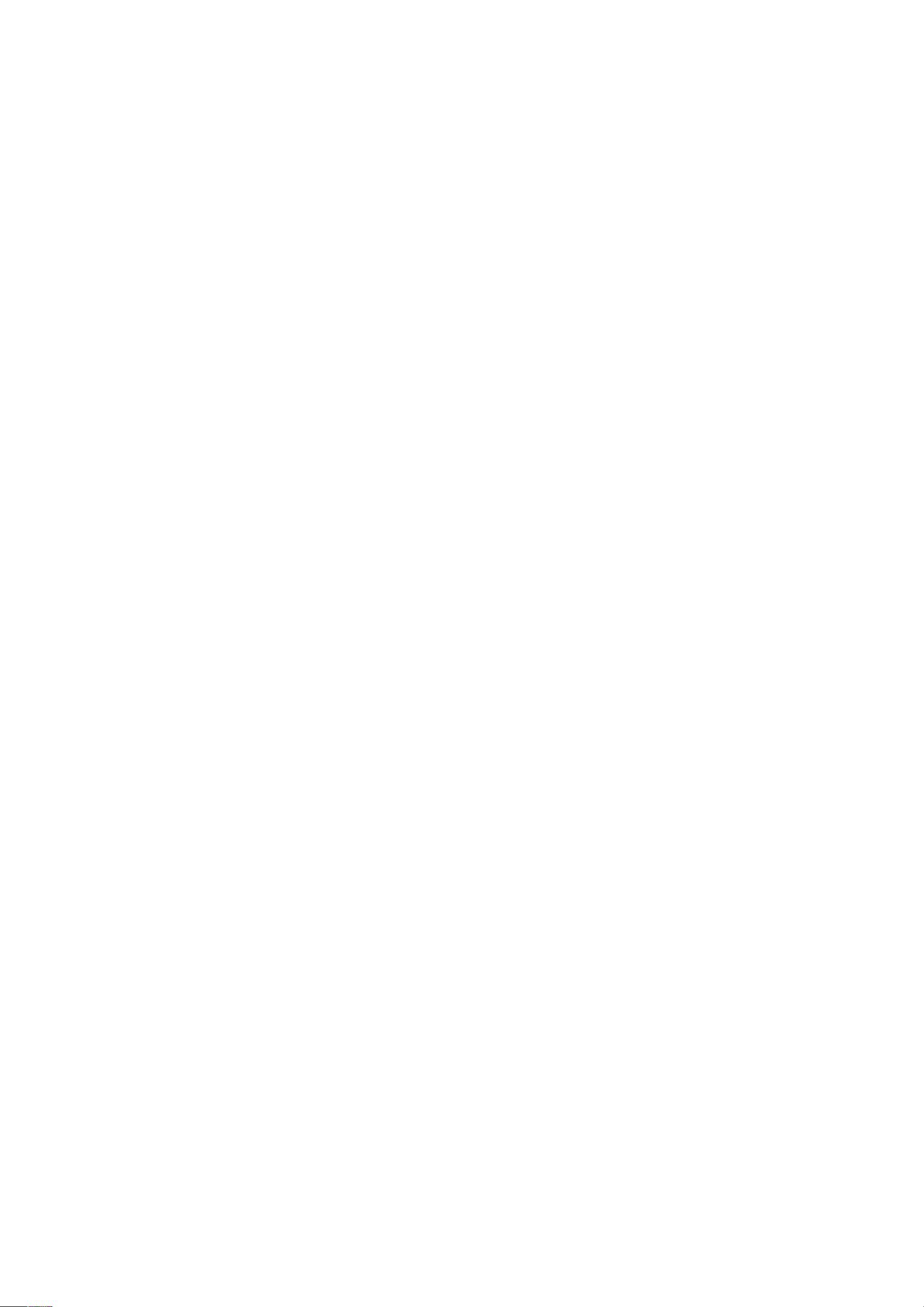
对三自由度的平移和旋转耦合并联机械手进行了研究。机械手的结构是由一个移
动平台通过三个相同的系统连接到一个固定的基地(棱镜转动球形)串行的四肢,其
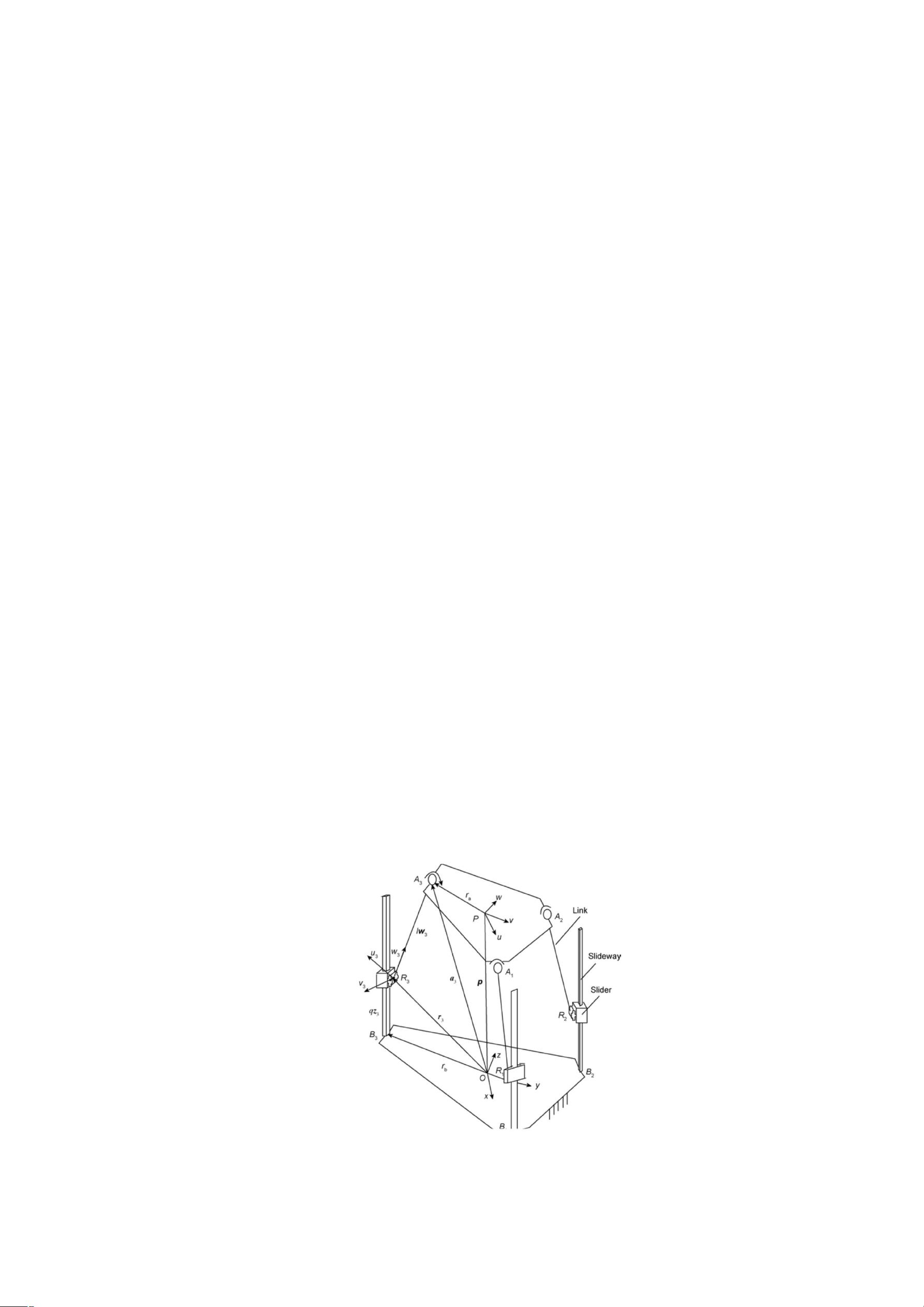
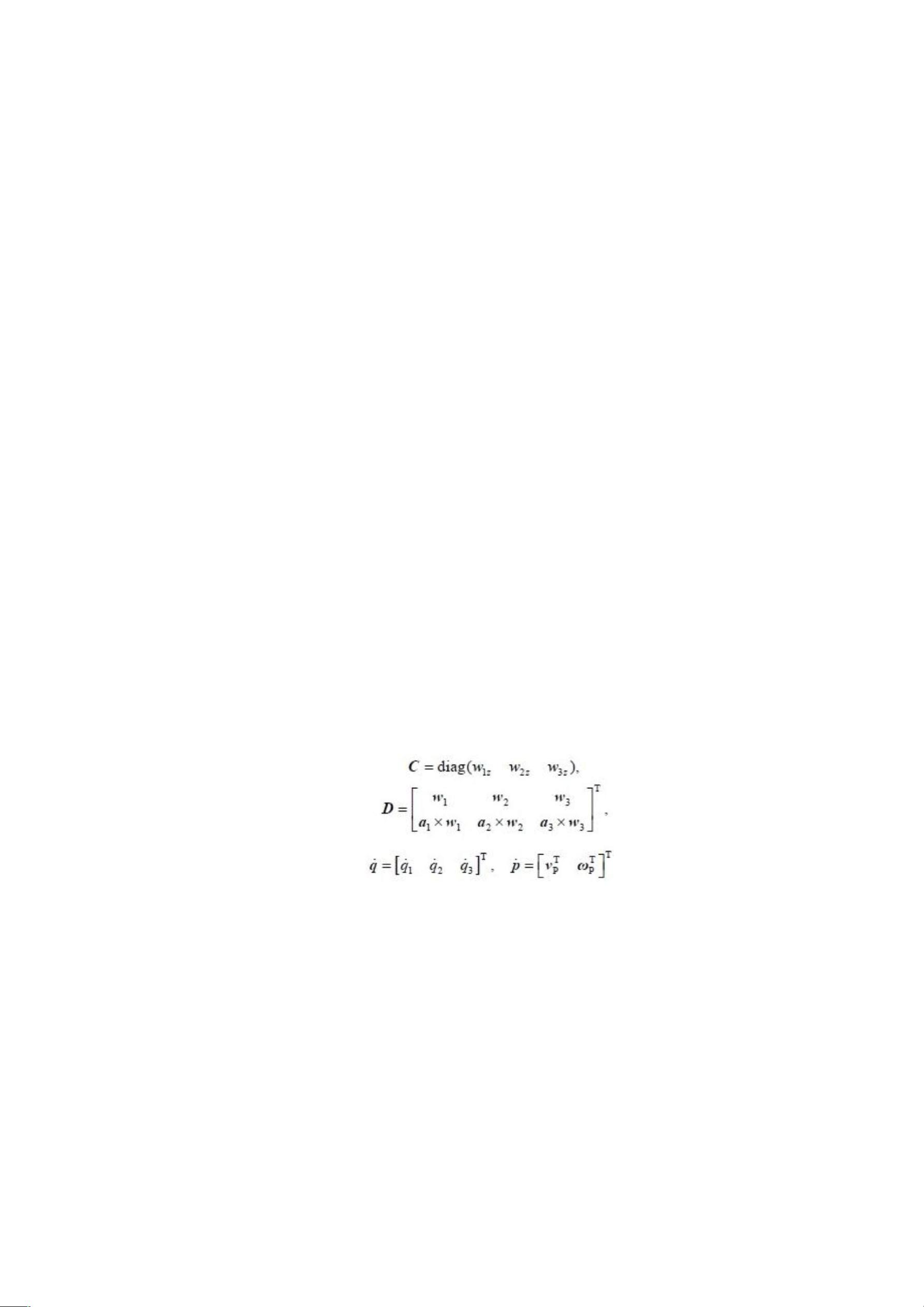
独特的拓扑结构,导致传统的雅可比矩阵的物理单元的不一致和寄生运动的出现。本
文介绍了一种基于尺寸均匀的雅可比矩阵的条件下,机械手的 kinetostatic 性能指标
后,上述机器人工作空间的搜索和分析的关键设计变量对工作空间的影响。最后,提
出了一种机械手的尺寸的合成方法,它可以看作是一个主题的寄生运动和其他一些工
程约束的非线性规划问题。
PKMS(并联运动机床),三维合成,尺寸均匀的雅可比,3-PRS 机械手,工作区。
联机器人。中国技术科学,2010,53:168-174,DOI:10.1007/s11431-009-0375-y
1 引言
有限的自由度(自由度)PKMS (并联机床)的发展一直是研究的热点,由于
案情 PKMS 的深入浅出结构,成本较低,易于控制等一系列与6自由度 PKMS 比较。
平移和旋转耦合的有限自由度 PKMS 的外观和应用提供了用于制造或装配在飞机和
汽车行业大型零件的瓶颈问题的选项。举例来说,一个精心设计的有限自由度并联机
床具有平移和旋转的耦合可能被集成到数控加工单元作为一个插件和播放模块,它可
以沿着一个超长轨道或其他辅助设备在大型驱动飞机和汽车零部件加工或组装。与平
移和旋转耦合的有限自由度 PKMS 的杰出代表,在3 -PRS(棱柱回转球面)机器人已
经应用到很多方面,因为结构紧凑,出色的运动学和动力学性能,例如,由DS 技术
公司[ 1著名短跑 Z3头,2 ]在德国,以及参考文献[ 3 ] 最初提出的望远镜中的应用,
等等。
对3-PRS 机械手的基本架构是一个轴对称并联机构的三个相同的 PRS 的四肢,
这里的棱柱关节都被认为是启动。该机械手的一些理论研究结果已发表在过去的几十
1
剩余10页未读,继续阅读
资源评论













