加速度融合陀螺仪一种算法

原文翻译:
http://www.geek-workshop.com/forum.php?
mod=viewthread&tid=1695&reltid=2126&pre_thread_id=0&pre_pos=2&ext=
原英文版本:
http://www.starlino.com/imu_guide.html
本帖翻译自 IMU(加速度计和陀螺仪设备)在嵌入式应用中使用的指南。
这篇文章主要介绍加速度计和陀螺仪的数学模型和基本算法,以及如何融合这两者,侧重
算法、思想的讨论
介绍
本指南旨在向兴趣者介绍惯性 MEMS(微机电系统)传感器,特别是加速度计和陀螺仪以
及其他整合 IMU(惯性测量单元)设备。
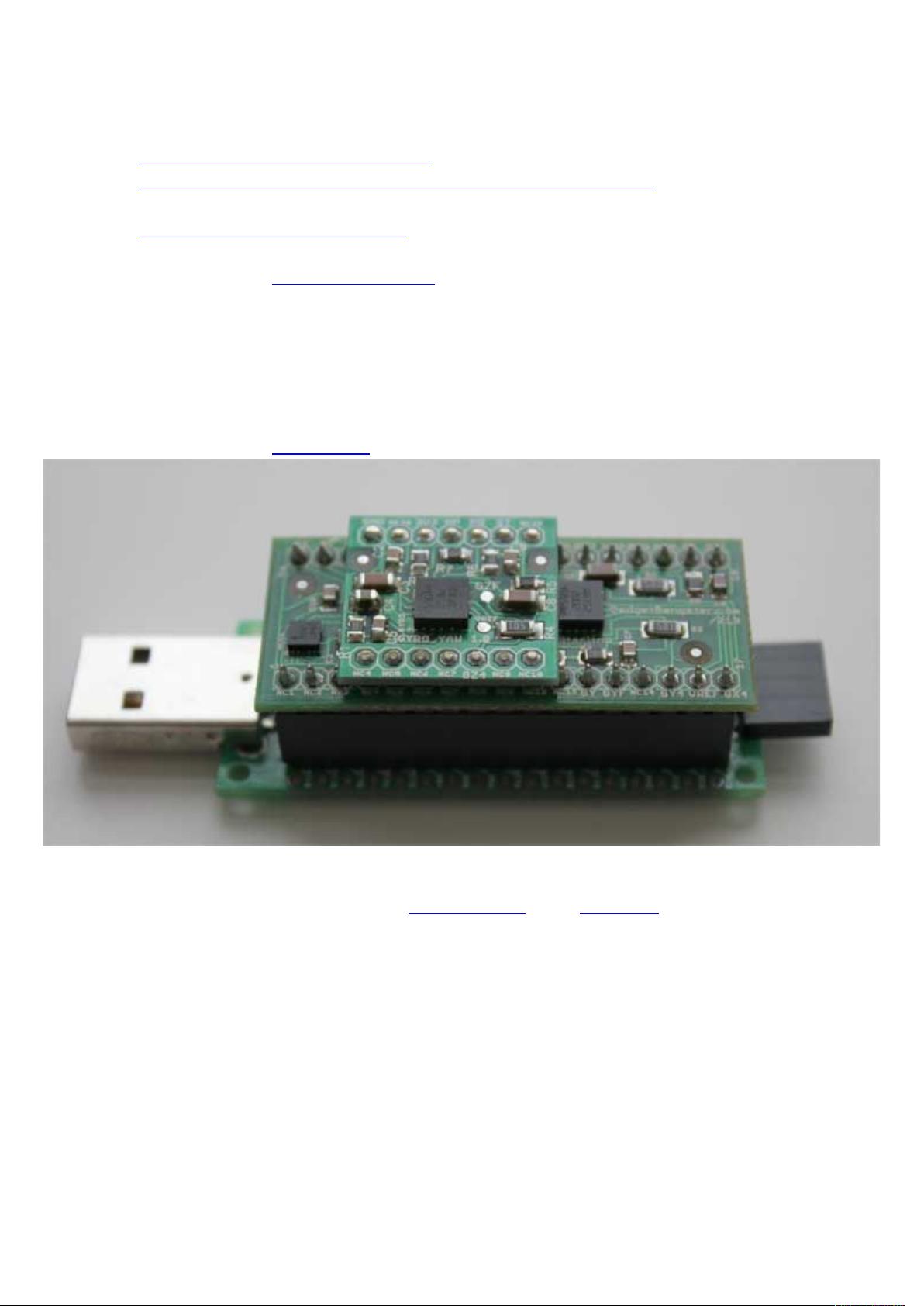
IMU 单元例子:上图中 MCU 顶端的 ACC Gyro 6DOF,名为 USBThumb,支持 USB/串口
通信
在这篇文章中我将概括这么几个基本并且重要的话题:
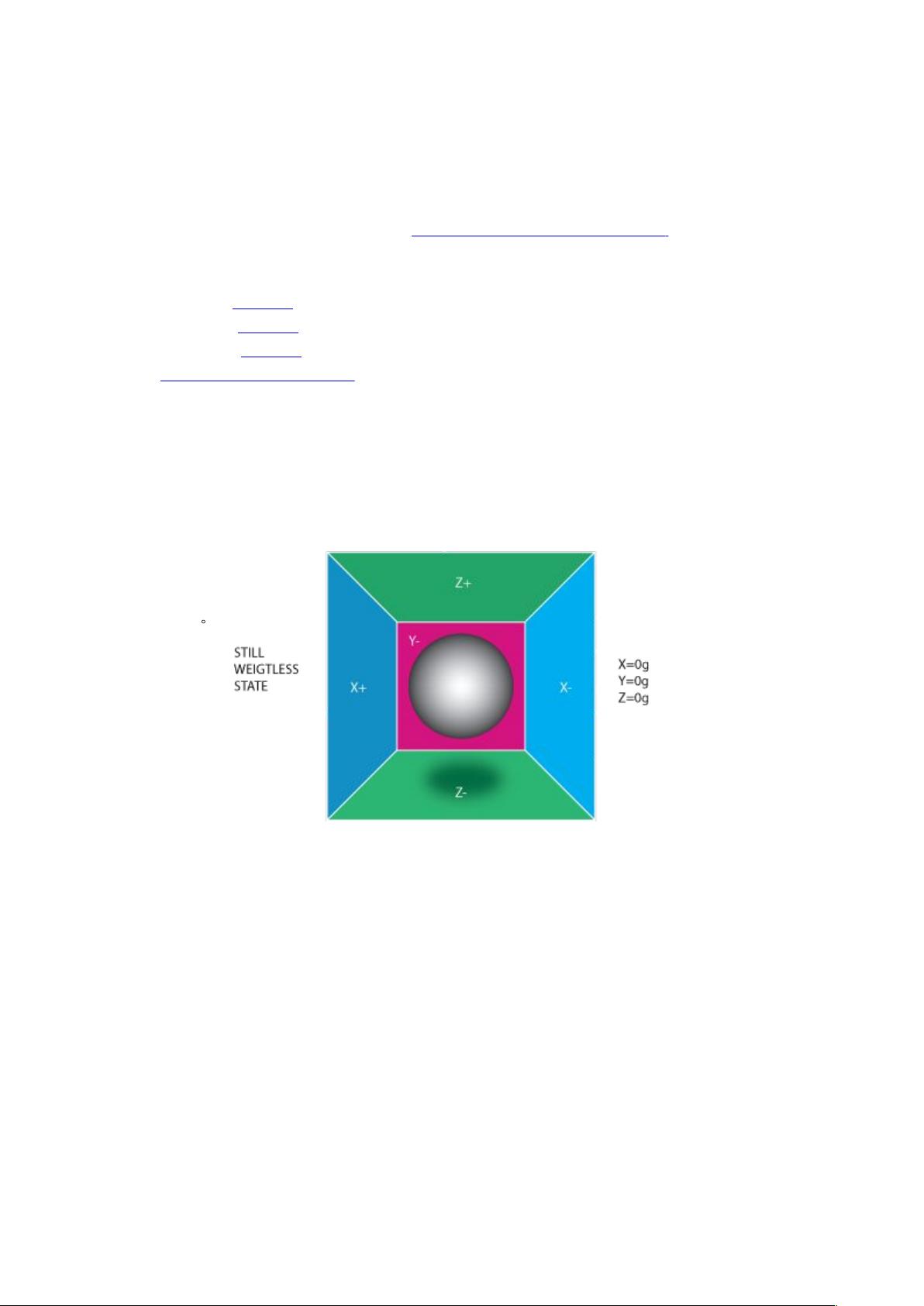
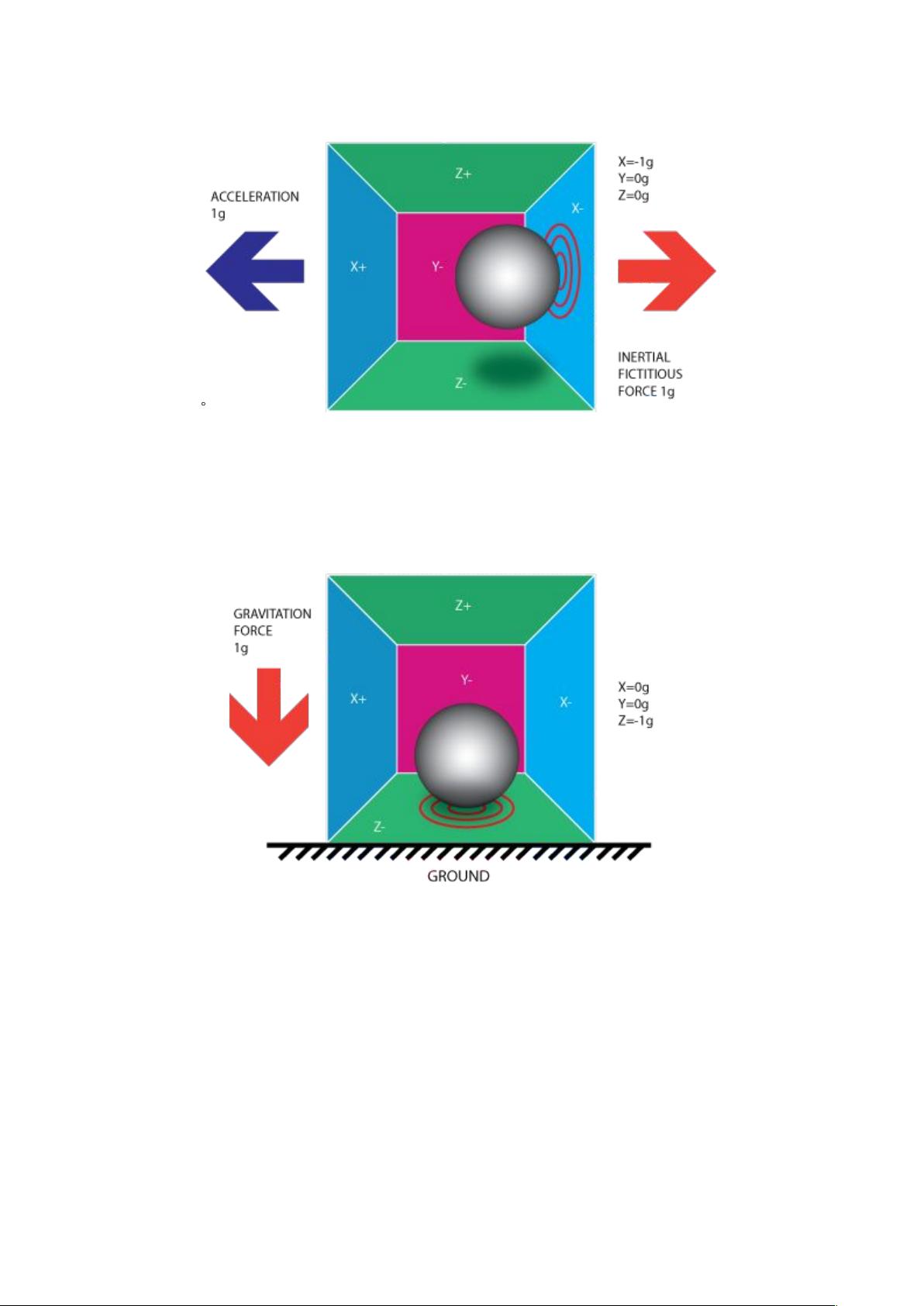
- 加速度计(accelerometer)检测什么
- 陀螺仪(gyroscope,也称作 gyro)检测什么
- 如何将传感器 ADC 读取的数据转换为物理单位(加速度传感器的单位是 g,陀螺仪的单
位是 度/秒)
- 如何结合加速度传感器和陀螺仪的数据以得到设备和地平面之间的倾角的准确信息
在整篇文章中我尽量将数学运算降低到最少。如果你知道什么是正弦、余弦、正切函数,
那无论你的项目使用哪种平台你应该都会明白和运用这篇文章中的思想,这些平台如
Arduino、Propeller、Basic Stamp、Ateml 芯片、PIC 芯片等等。总有些人认为使用 IMU 单
剩余12页未读,继续阅读













- 1
- 2
- 3
- 4
- 5
- 6
前往页