397
CHAPTER
24
Linear Image Processing
Linear image processing is based on the same two techniques as conventional DSP: convolution
and Fourier analysis. Convolution is the more important of these two, since images have their
information encoded in the spatial domain rather than the frequency domain. Linear filtering can
improve images in many ways: sharpening the edges of objects, reducing random noise, correcting
for unequal illumination, deconvolution to correct for blur and motion, etc. These procedures are
carried out by convolving the original image with an appropriate filter kernel, producing the
filtered image. A serious problem with image convolution is the enormous number of calculations
that need to be performed, often resulting in unacceptably long execution times. This chapter
presents strategies for designing filter kernels for various image processing tasks. Two important
techniques for reducing the execution time are also described: convolution by separability and
FFT convolution.
Convolution
Image convolution works in the same way as one-dimensional convolution. For
instance, images can be viewed as a summation of impulses, i.e., scaled and
shifted delta functions. Likewise, linear systems are characterized by how they
respond to impulses; that is, by their impulse responses. As you should expect,
the output image from a system is equal to the input image convolved with the
system's impulse response.
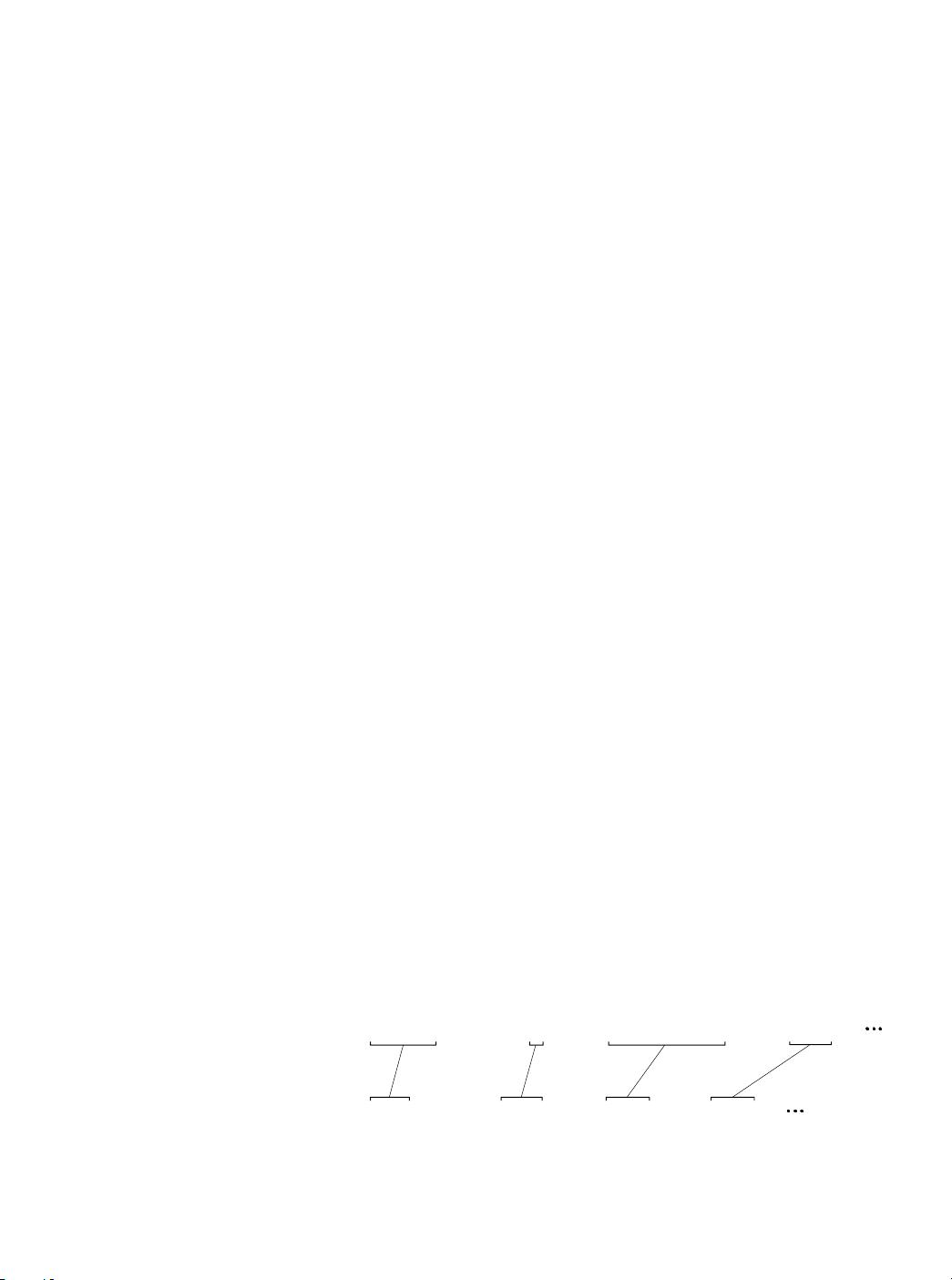
The two-dimensional delta function is an image composed of all zeros, except
for a single pixel at: row = 0, column = 0, which has a value of one. For now,
assume that the row and column indexes can have both positive and negative
values, such that the one is centered in a vast sea of zeros. When the delta
function is passed through a linear system, the single nonzero point will be
changed into some other two-dimensional pattern. Since the only thing that can
happen to a point is that it spreads out, the impulse response is often called the
point spread function (PSF) in image processing jargon.