
合肥工业大学 2012 年硕士研究生初试专业课笔试试题
考试科目名称:自动控制原理
适用专业:控制理论与控制工程、检测技术与监测装置、模式识别与智能系统、
控制工程(专业学位)
(考生注意:答题请写在报考点统一发放的答题纸上,写在试卷上的一律无
效)
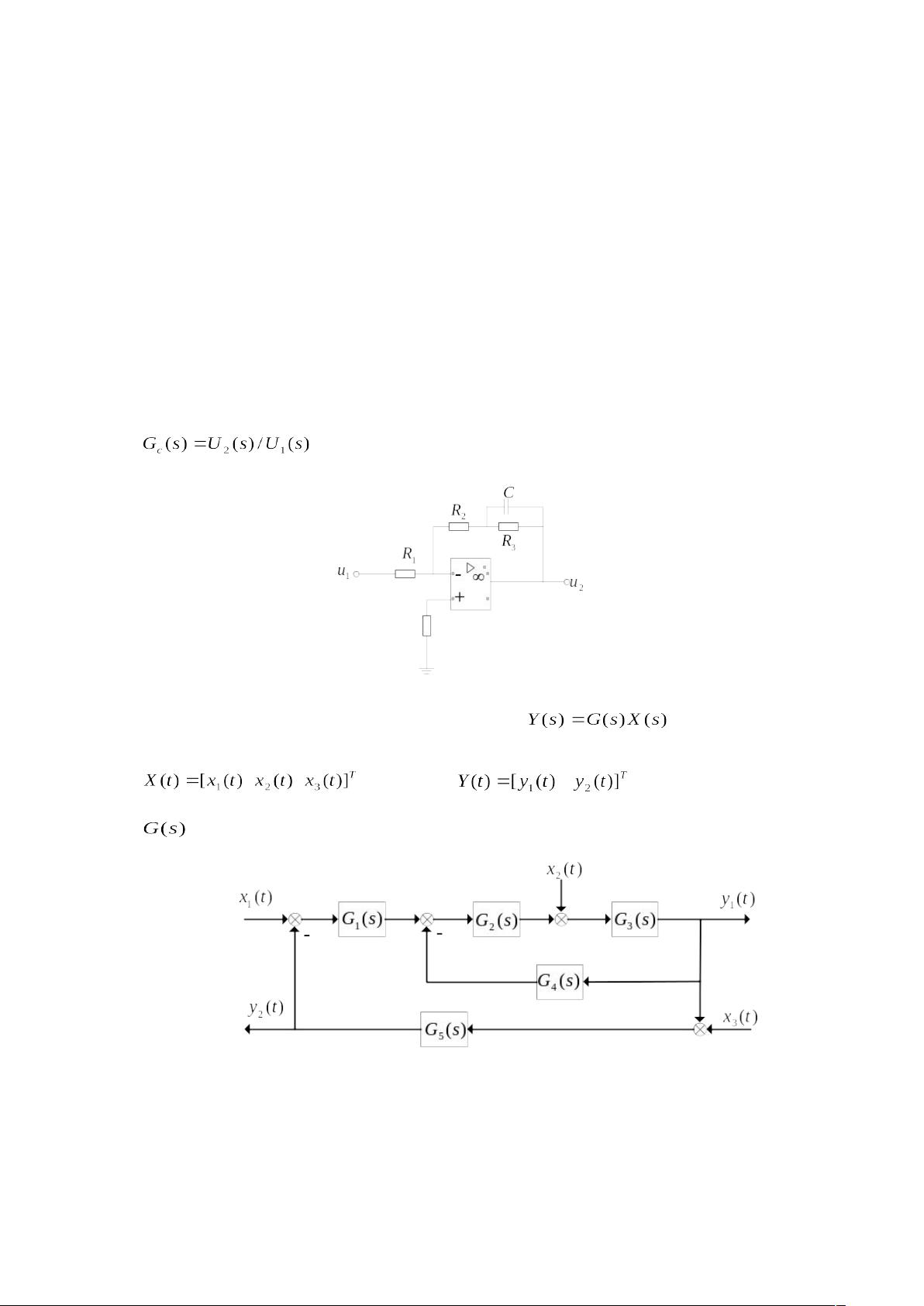
( 一 ) 、 ( 6 分 ) 有 源 校 正 装 置 如 图 所 示 。 求 校 正 装 置 的 传 递 函 数
,指出该校正装置具有何种校正作用并说明理由。
(二)、(15 分)已知控制系统结构图如下, ,其中输入量
,输出向量 。求传递函数矩阵
。
三、(25 分)控制系统的结构如图所示:
资源评论


工作狂_2.0
- 粉丝: 0
- 资源: 2









最新资源
- C/C++/Python/Java四种语言下的算法实现资源概览
- 12月月考期末复习资料.zip
- 2024 年(第 7 届)“泰迪杯”数据分析技能赛B 题 特殊医学用途配方食品数据分析
- usr_mk918_EN.hmi2
- Python源码实例集锦-猜数字游戏、Tkinter计算器、Flask Web应用、Pandas数据分析、BeautifulSoup爬虫入门
- 1111java:wude学习资料1111
- javaWeb物资管理系统项目源码
- Spring Boot开发资源综述:书籍、课程、工具与实战项目指导
- 毕业设计全流程指南:从知识资源到项目实施
- 2024 年(第 7 届)“泰迪杯”数据分析技能赛A 题 自动化生产线数据分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


