GPS与GLONASS在射频硬件上的考虑
需积分: 9 23 浏览量
2018-09-13
13:37:51
上传
评论
收藏 2.69MB PDF 举报

GPSandGLONASS
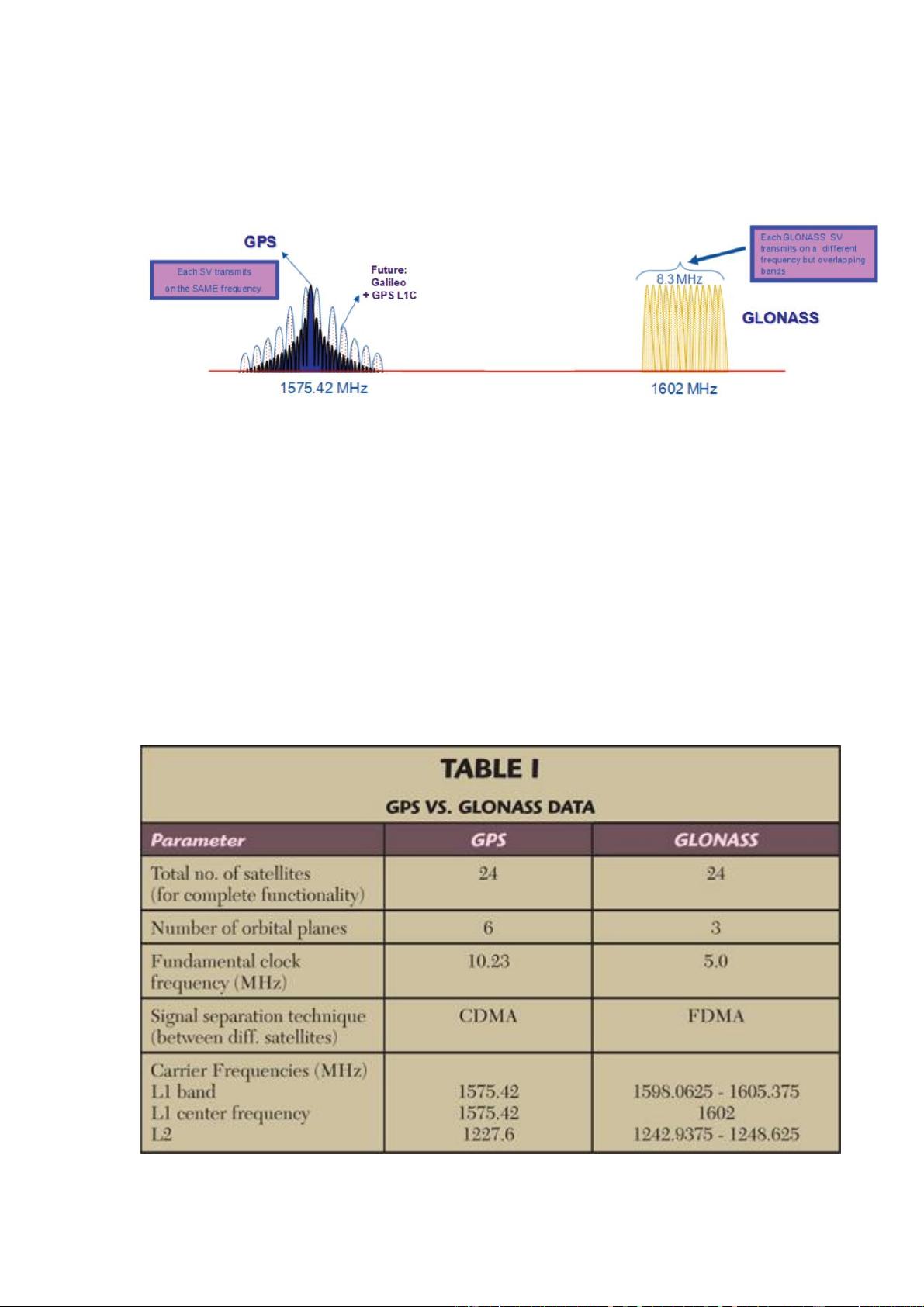
上图是 GPS与 GLONASS在频谱上的差异处[47],GLONASS与GPS都是展频通讯,
但不同的是,GLONASS 是分频多任务,每颗卫星会发射不同的频道,每个频道
相隔 0.5625MHz,但会有重迭部分,亦即实际上,每个频道间距为正负 511KHz,
一共占了 8.3MHz 的带宽。而 GPS 则是每颗卫星都发射相同的频道
(1575.42MHz),但采用分码多任务的方式,连同主频两旁的波瓣,一共占了 20
MHz 的带宽,GPS 与 GLONASS 的规格如下表[86]:
1
剩余68页未读,继续阅读
资源评论













