(多目标假设跟踪)MHt.doc
需积分: 47 61 浏览量
2019-10-11
11:24:27
上传
评论 5
收藏 1.52MB DOC 举报

1
MHT 算法及其在多传感器跟踪方面的问题
1.1 MHT 算法的介绍
多假设跟踪算法(MHT)是一种在数据关联发生冲突时,形成多种假设以
延迟做决定的逻辑。与 PDA 合并多种假设的做法不同,MHT 算法把多个假设
继续传递,让后续的观测数据解决这种不确定性。举个例子,PDA 对所有假设
以对应的概率进行加权平均,然后再对航迹进行更新。因此,如果有 10 个假设,
PDA 会将这 10 个假设有效的合并只留下一个假设。而另一方面,MHT 却是保
持这 10 个假设的子集并延迟决定,这样可以利用之后的观测数据解决当前扫描
帧的不确定性问题。
1.2 关键术语及技术介绍
由于数据关联要保留所有可能的 hypothesis,所以 MHT 的计算量会大大增加
(如潜在的 tracks 和 hypothesis 数目),为了保证计算量的可行性,我们使用一
些技术来保证 MHT 算法实现的合理性。如聚类 clustering, hypothesis 和 track 的
剪枝(N-scan pruning),以及轨迹的合并 (track merging)等。
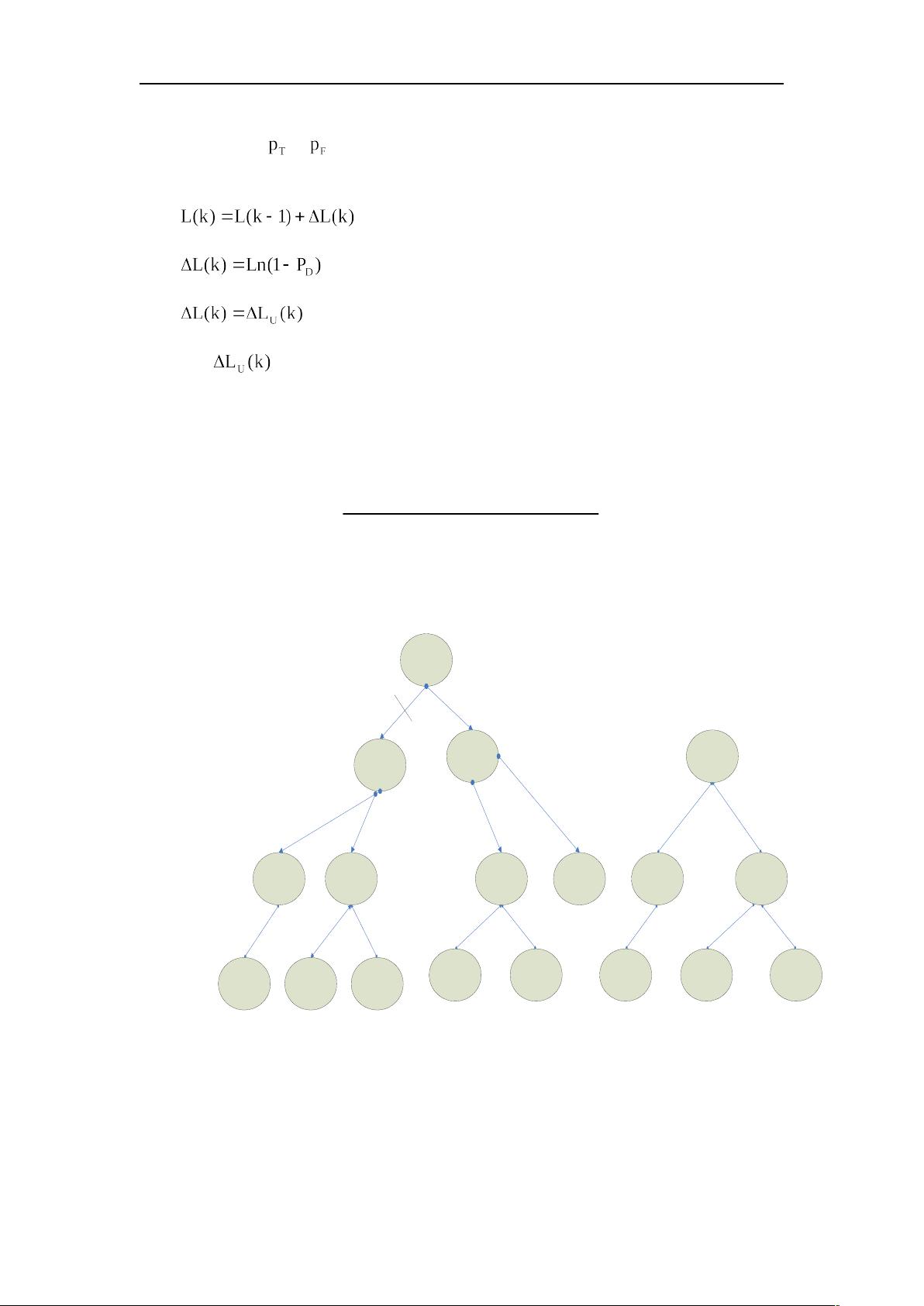
这里先结合图 1 对 MHT 中的一些关键术语及技术进行介绍。
1)Track:在图 1 中圆圈表示一个观测点,圆圈内序号就表示该观测关联上的
track 号,当序号改变时就说明新起始了一条 track。
2)Hypothesis:hypothesis 是指一些兼容的 tracks 的集合;而兼容 tracks 定义互
相没有共享观测点的 tracks 集合。这里一个分支就是一个 hypothesis。
3)Target:图 1 中由于 F1 中的 tracks 至少共有一个节点(根节点),所以这些
tracks 都不兼容,所以最多代表一个目标 target,即 F1 为一个 target。
4)Cluster:所有共享观测的 hypothesis 的集合
5 ) N-scan 剪 枝 : 在 当 前 帧 ( scan=K ) 找 出 每 个 target 中 可 能 性 最 大 的
hypothesis(即 probability 最大的分支)。在图 1 中,假设 track2 是可能性最
大的 hypothesis。 然后我们就从 scan=K 的 track2 开始回溯进行 N-scan 剪
枝(这里取 N=2)以建立 新的根节点(New Root Node)。对于那些没有包
含 New Root Node 节点的分枝进行剪枝,如图中所示,以合理的减少下一次
数据关联时的计算量。
6)score 函数:为了对形成的 track 进行初步的评价,删除不稳定的 track 以减
少运算量,我们引入 track score 函数对 track 的质量进行评价。

剩余17页未读,继续阅读






评论0
最新资源