Shape from Shading By Horn
需积分: 27 34 浏览量
2015-02-02
12:15:47
上传
评论 1
收藏 2.29MB PDF 举报

4.1
INTRODUCTION
4.1.1
Shading
as
a
Monocular
Depth
Cue
An
image
of
a
smooth
object
known
to
have
a
uniform
surface
will
exhibit
gradations
of
reflected
light
intensity
which
can
be
used
to
determine
its
shape.
This
is
not
obvious
since
at
each
point
in
the
image
we
know
only
the
reflectivity
at
the
corresponding
object
point.
For
some
points
(called
singular
points
here)
the
reflectivity
does
uniquely
determine
the
local
normal,
but
for
almost
all
points
it
does
not.
Consequently,
the
shape
of
the
surface
cannot
be
found
by
local
operations
alone.
For
many
surfaces
the
fraction
of
the
incident
light
which
is
scattered
in
a
given
direction
is
a
smooth
function
of
the
angles
involved.
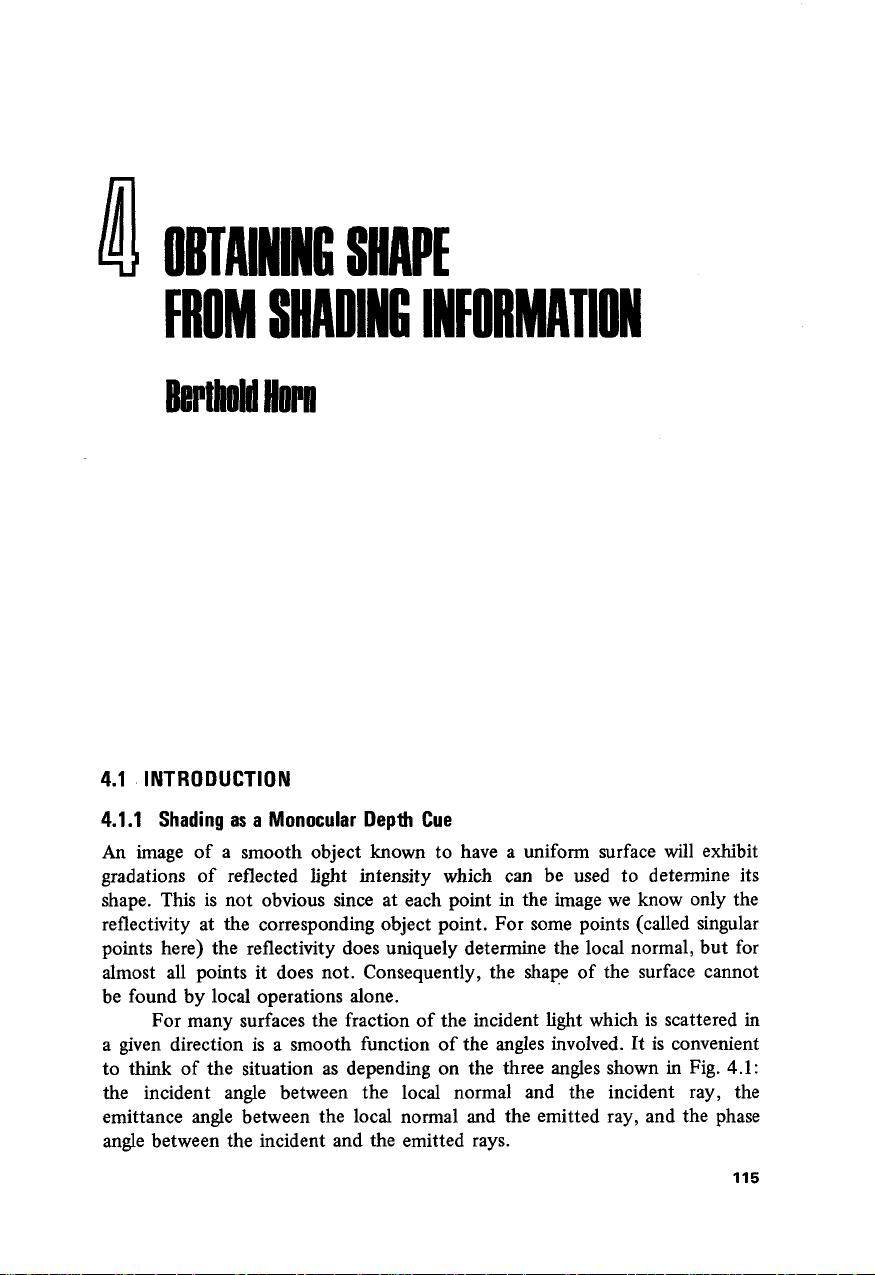
It
is
convenient
to
think
of
the
situation
as
depending
on
the
three
angles
shown
in
Fig.
4.1:
the
incident
angle
between
the
local
normal
and
the
incident
ray,
the
emittance
angle
between
the
local
normal
and
the
emitted
ray,
and
the
phase
angle
between
the
incident
and
the
emitted
rays.
115
剩余41页未读,继续阅读
资源评论


houzhuding
- 粉丝: 0
- 资源: 3











