没有合适的资源?快使用搜索试试~
我知道了~
文库首页
开发技术
其它
利用ADAMS进行机器人的轨迹规划
利用ADAMS进行机器人的轨迹规划
adams
需积分: 49
52 下载量
39 浏览量
2015-10-14
09:54:18
上传
评论
5
收藏
499KB
PPT
举报
温馨提示
立即下载
利用ADAMS进行机器人的轨迹规划,对于adams软件的初学者具有一定的指导意义
资源推荐
资源详情
资源评论
基于MATLAB和ADAMS的并联机器人的轨迹规划仿真研究.pdf
浏览:161
5星 · 资源好评率100%
基于MATLAB和ADAMS的并联机器人的轨迹规划仿真研究.pdf
六自由度机械手臂路径规划matlab和Adams联合仿真模型
浏览:137
5星 · 资源好评率100%
本文为六自由度机械手臂路径规划matlab和Adams联合仿真模型,模型通过matlab实现对六自由度机械手臂路径规划的控制使Adams中的模型(Adams中的模型为solid works六自由度机械手臂)可以在空间画圆和画直线,并将轨迹输出在Adams中和matlab中
利用ADAMS进行机器人的轨迹规划PPT课件.pptx
浏览:199
利用ADAMS进行机器人的轨迹规划PPT课件.pptx
基于Adams的Delta机器人路径规划设计与仿真.pdf
浏览:24
#资源达人分享计划#
机器人轨迹规划(关节空间轨迹规划和笛卡尔空间轨迹规划)
浏览:12
用Robotics Toolbox for MATLAB做的一个Motoman机器人的关节空间轨迹规划和笛卡尔空间轨迹规划代码
基于SimMechanics的4自由度机器人的轨迹规划和仿真系统设计
浏览:201
4星 · 用户满意度95%
重点学习matlab模块中的SimMechanics
ADAMS教程,非常不错的一个培训教程,希望能帮助初学者解决问题
浏览:74
ADAMS教程,非常不错的一个培训教程,希望能帮助初学者解决问题
机械臂/机器人 轨迹规划 matlab
浏览:146
5星 · 资源好评率100%
两点间五次多项式轨迹规划,首先安装机器人工具箱,再执行matlab程序。这是直接用工具箱中的,默认是五次多项式。如果想用笛卡尔和关节空间的不同轨迹规划以及不是五次多项式例如样条的,联系我CSDn。
基于MATLAB_Robotics工具箱的工业机器人轨迹规划及仿真研究
浏览:145
5星 · 资源好评率100%
基于MATLAB_Robotics工具箱的工业机器人轨迹规划及仿真研究
基于ADAMS的五自由度机械手运动学仿真
浏览:124
adams的五自由度机械手运动学仿真,希望对大家的学习有所帮助
机器人轨迹规划
浏览:135
4星 · 用户满意度95%
好的参考文献资料 关于机器人轨迹规划控制系统研究方面
机器人轨迹规划的研究
浏览:178
课题的规划主要是在操 作空间中,依据机器人操作臂运动时有无路径约束和运动约束的要求来进行规划 的。通过对机器人操作臂的轨迹规划的具体分析、基于运动学寻轨迹算法的模拟 实现、关节空间的轨迹优化等方面的全过程的研究,阐述了机器人轨迹规划的一 般规律。研究出的规划方法可以很好解决在机器人操作空间规划时,实时性和精 确性的矛盾,以及关节空间中的时间最小优化问题。
基于ADAMS的机器人动力学分析及轨迹规划.pdf
浏览:92
5星 · 资源好评率100%
基于ADAMS的机器⼈动⼒学分析及轨迹规划 2.1 串联机器⼈ 串联机器⼈ 在ADAMS中⽤连杆模拟机械臂,对两⾃由度的机械臂分别进⾏运动学分析、动⼒学分析及机械臂的轨迹规划。 2.1.1 运动学分析 运动学分析 下⾯是建⽴模型并对模型进⾏设置分析的详细过程。 (1) 启动ADAMS/View,在欢迎对话框中选择新建模型,模型取名为Robot_arm,并将单位设置为MMKS,然后单击OK。 (2)
机器人轨迹规划软件
浏览:55
机器人轨迹规划软件
基于ADAMS的某球形机器人运动分析
浏览:157
基于ADAMS的某球形机器人运动分析,孙琪,,研究了一种转向和驱动行走两种运动分开的全方位运动球形机器人,对其模型进行简化建立了ADAMS虚拟样机模型。基于ADAMS仿真软件对模�
Adams动力学仿真分析的详细步骤
浏览:64
4星 · 用户满意度95%
Adams动力学仿真分析的详细步骤
基于ADAMS的七自由度机器人动力学分析及仿真_冯玉倩
浏览:114
基于ADAMS的七自由度机器人动力学分析及仿真_冯玉倩,caj格式
工程案例—机器人Adams虚拟实验详细步骤
浏览:52
该文档讲述adams的仿真,以及其中的一些步骤,或许文档会对你有些帮助!
ADAMS串联机器人仿真与轨迹规划【源文件】
浏览:85
5星 · 资源好评率100%
以六自由度工业机器人为例,介绍利用ADAMS软件进行串联机器人运动学仿真的具体步骤,实现机器人末端走出一条长方形轨迹。 软件版本为ADAMS 2016,2016以前的版本打不开,请注意!!
基于MATLAB和ADAMS的机械臂的轨迹规划与协调控制_毕业论文.pdf
浏览:86
基于MATLAB和ADAMS的机械臂的轨迹规划与协调控制_毕业论文.pdf
六足机器人轨迹规划
浏览:2
六足机器人的轨迹规划:设计了一种具有变形关节和轮式足端的新型仿生六足机器人,该机器人具备轮式、爬行、步行等运动模式,有较好的灵活性及环境适应力。
基于ADAMS的仿壁虎机器人步态规划及仿真
浏览:176
非常非常不错的一篇论文; 文中有复杂的三维仿壁虎机器人的建模及其步态分析及ADAMS仿真分析
基于ADAMS的仿壁虎机器人步态规划及仿真.pdf
浏览:159
入门教材,适合广泛应用,对于初学者可以进行体系建立,了解当前时代更新知识。紧跟时代变化知识体系。快来看一看。
机器人的轨迹规划.ppt
浏览:157
机器人的轨迹规划.ppt该文档详细且完整,值得借鉴下载使用,欢迎下载使用,有问题可以第一时间联系作者~
第9章 机器人轨迹规划
浏览:187
机器人学 第三版 蔡自兴 授课PPT,介绍机器人学的基本原理及其应用,全书共12章,系统而全面的介绍机器人学方面的知识。
基于ADAMS和MATLA动轨迹规划和控制的联合仿真.pdf
浏览:118
基于ADAMS和MATLA动轨迹规划和控制的联合仿真.pdf
robot_轨迹规划_robot轨迹规划_机器人;轨迹规划_
浏览:108
matlab机器人工具箱三次插值轨迹规划
PUMA560机器人轨迹规划
浏览:155
3星 · 编辑精心推荐
PUMA560机器人轨迹规划MATLAB程序,用于分析绘制关节运动轨迹
利用
利用
ADAMS
ADAMS
进行机器人的
进行机器人的
轨迹规划
轨迹规划
1
1
轨迹规划的原理
轨迹规划的原理
1.1
基本概念
机器
人的轨迹规划就是根据
作业任务要
求,计算出机器人预期
的运动轨迹以及相应的
运动输入规律。
1.2
传统的规划方法
传统
的轨迹规划方法实质上
是位置反解
问题,即求出机器人的
位置反解方程(驱动输
入关于位置输出的函数
),然后再将机器人末
端执行器的运动轨迹方
程代入反解方程,从而
得到与该运动轨迹相对
应的各驱动关节的驱动
参数。
1
)将机器人
末端参考点的轨迹
曲线的参数方程作
为点驱动的参数,
若参数方程数目小
于自由度数目,需
要对多余的运动参
数进行限制。
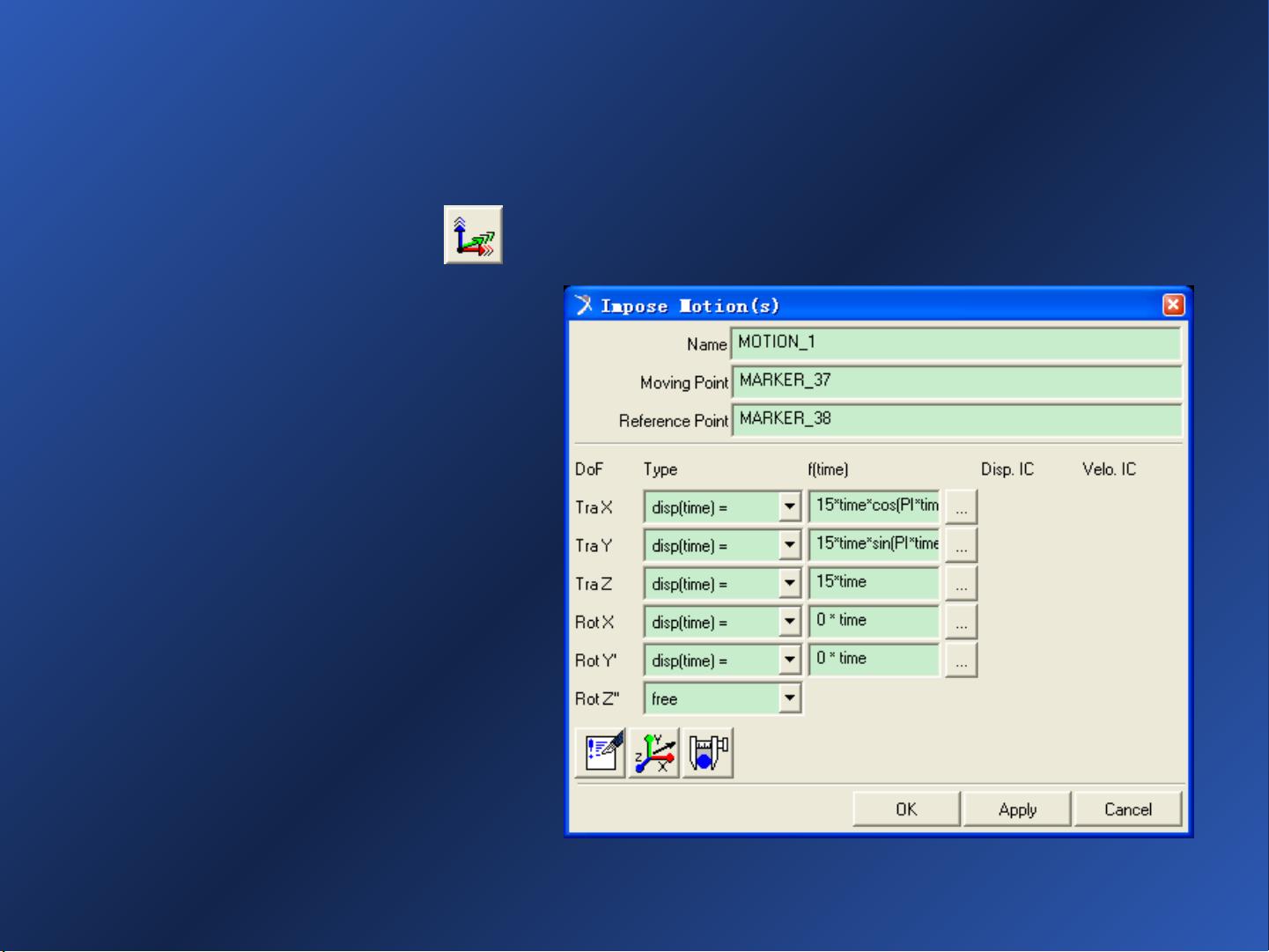
1.3
利用
A
DAMS
软件进行轨
迹规划方法
利用
ADAMS
进行轨迹规划需要用到软
件中的“一般点驱动”
和“样条函数驱动”工具。
图
1
一般点驱动参
数设置对话框
2
)添加驱动
并仿真后利用后处理得
到
各驱动关节的运动输入
的曲线,再利用
spline
工具对曲线采集数据样
点,作为驱动输入的参
数。
3
)删除前面
添加的一般点驱动,然
后
在各驱动关节上添加驱
动,修改驱动参数为样
条函数驱动。
利用
ADAMS
软件进行轨迹规划可不必
再进行位置反解。
剩余15页未读,
继续阅读
评论
收藏
内容反馈
立即下载
资源评论
资源反馈
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~
联系上传者
评论
heqijin
粉丝: 0
资源:
1
私信
上传资源 快速赚钱
我的内容管理
展开
我的资源
快来上传第一个资源
我的收益
登录查看自己的收益
我的积分
登录查看自己的积分
我的C币
登录后查看C币余额
我的收藏
我的下载
下载帮助
前往需求广场,查看用户热搜
最新资源
unity10000个常用汉字
使用C#调用python操作
IMG20240425002617.jpg
IMG_2775.MOV.mov
00023(1).MTS
OSPF11111111
Python实现kmp算法.zip
kmp算法测试.zip
kmp算法0.0.zip
java-KMP算法的讲解.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈
安全验证
文档复制为VIP权益,开通VIP直接复制
信息提交成功