g2o源码阅读笔记;g2o源码阅读笔记
需积分: 1 10 浏览量
2023-03-03
14:56:37
上传
评论
收藏 149KB DOCX 举报

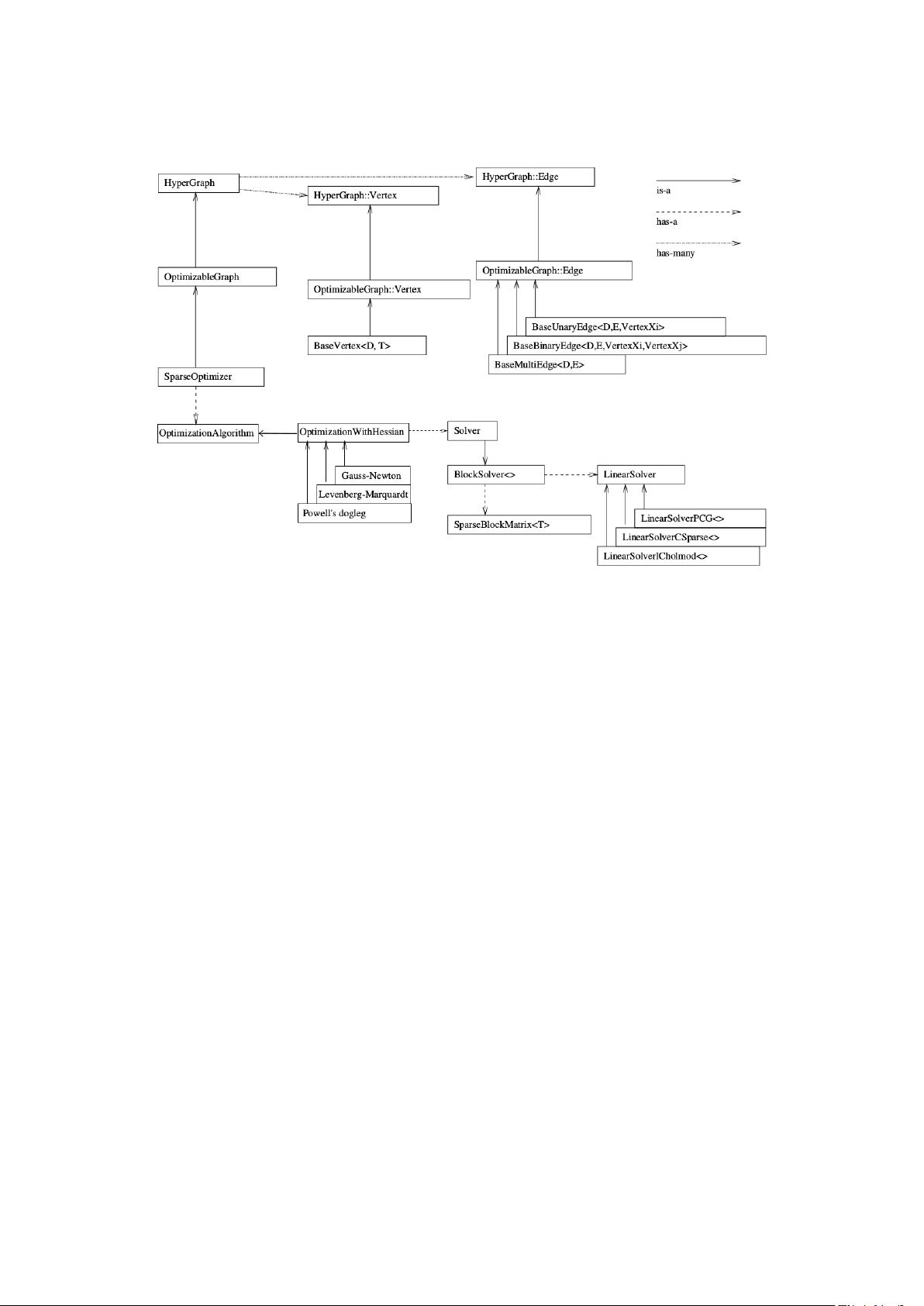
g2o 源码阅读
1 图的构建
顶点的添加
optimizer.addVertex(vSE3);
实际调用
bool OptimizableGraph::addVertex(HyperGraph::Vertex* v, Data* userData)
主要工作:
1 通过 ID 判断 顶点是否已经被插入过
2 return HyperGraph::addVertex(v);
bool HyperGraph::addVertex(Vertex* v)
中 _vertices.
insert
(
std
::
make_pair
(v->id(),v) );
_vertices 类型为
std
::
tr1
::
unordered_map
<int, Vertex*>


剩余15页未读,继续阅读
资源评论


pangdawa
- 粉丝: 124
- 资源: 9











