过程控制实验报告
实验四 解耦控制系统仿真分析
一、实验目的
1. 进一步学习解耦控制系统的基本原理;
2. 利用 MATLAB/SIMULINK 有效进行解耦控制系统的分析与设计。
二、实验设备
1. 硬件:个人计算机;
2. 软件:MATLAB 7.0 / SIMULINK 5.0 仿真软件(或以上)。
三、实验内容和步骤
过程控制系统中变量之间的耦合(关联)是普遍存在的,各变量之间有时有强耦合(强关
联),而有时只是松散的耦合,甚至无耦合。过程控制系统之间的耦合(关联)程度可用传
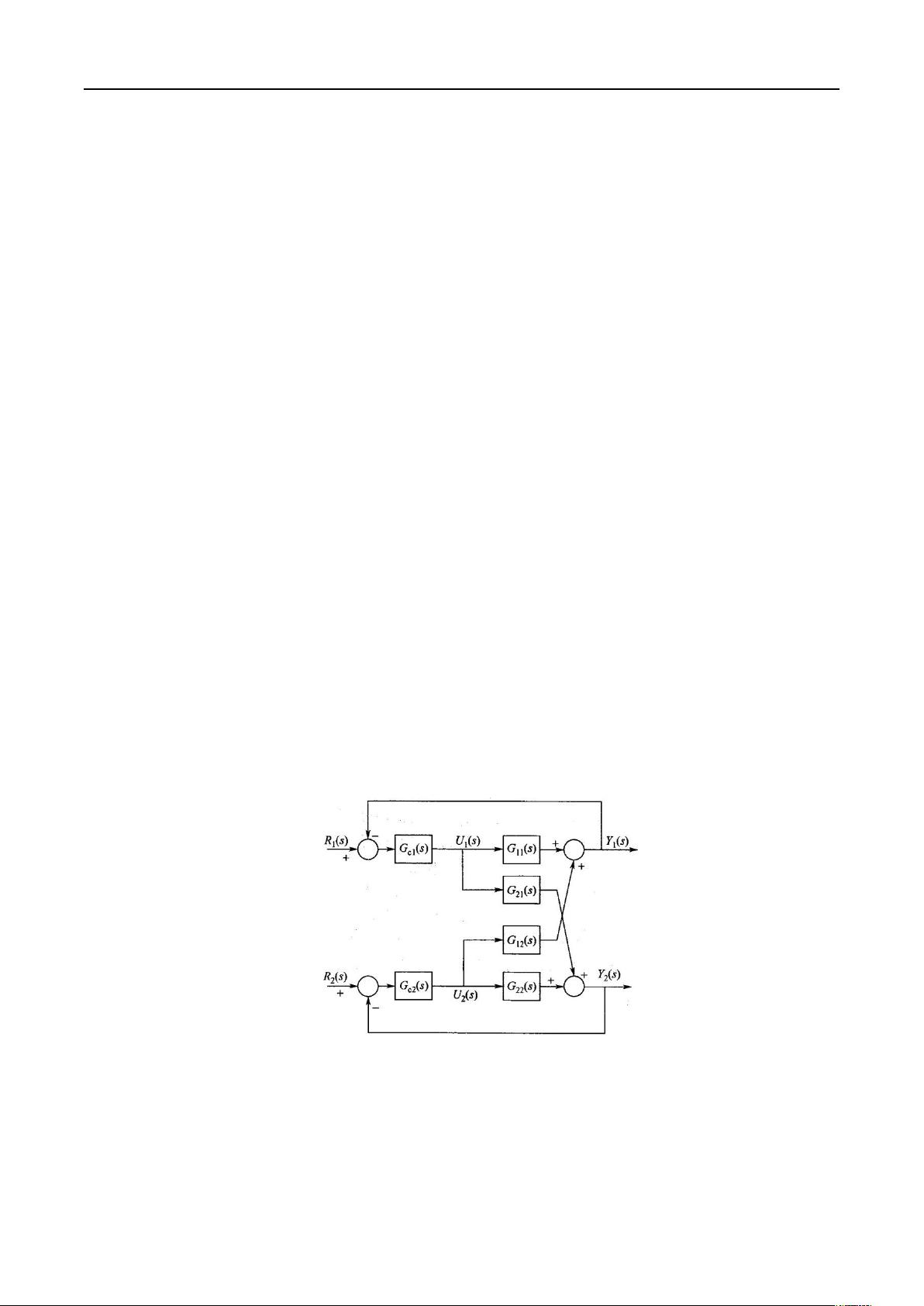
递函数矩阵表示。图 1 给出了双输入双输出耦合控制系统结构框图。
图 1 双输入双输出耦合控制系统结构框图
确定各变量之间耦合程度的分析方法有直接法和相对增益法。直接法是采用解析法得到
各变量之间的传递函数关系,从而确定过程中每个变量相对于每个控制作用的耦合程度。相

















评论0