AN--PIC16F690--BLDC.pdf
需积分: 10 107 浏览量
2009-05-28
15:00:48
上传
评论
收藏 482KB PDF 举报

© 2008 Microchip Technology Inc. DS01175A-page 1
AN1175
INTRODUCTION
There is a lot of interest in using Brushless DC (BLDC)
motors. Among the many advantages to a BLDC motor
over a brushed DC motor, we can enumerate the
following:
• The absence of the mechanical commutator
allows higher speeds
• Brush performance limits the transient response
in the DC motor
• With the DC motor you have to add the voltage
drop in the brushes among motor losses
• Brush restrictions on reactance voltage of the
armature constrains the length of core reducing
the speed response and increasing the inertia for
a specific torque
• The source of heating in the BLDC motor is in the
stator, while in the DC motor it is in the rotor,
therefore it is easier to dissipate heat in the BLDC
• Reduced audible and electromagnetic noise
There are many different types of brushless motors,
and the differences are:
- The number of phases in the stator
- The number of poles in the rotor
- The position of the rotor and stator relative to
each other (rotor spinning inside the stator
vs. rotor spinning outside the stator)
This application note will discuss the three-phase
motors. Two-phase motors are discussed in AN1178,
“Intelligent Fan Control” (DS01178) while one-phase
motors are a degenerated form of two-phase motors.
BACKGROUND
For a full description of three-phase brushless motors,
read the application note “Brushless DC Motor Control
Made Easy” (DS00857). AN857 is an excellent
description of brushless motors and how to drive them
with sensor feedback for commutation. With more
advanced comparator modes and some new software
techniques, this application note demonstrates an
improved sensorless commutation strategy that has a
much higher performance.
MOTOR CONTROL
BLDC motor control consists of two parts. Part 1 is
commutating the motor at the most efficient rate. Part 2
is regulating the speed of the motor within defined
parameters. The purpose of this application note is to
illustrate an elegant sensorless technique that can be
implemented on low-cost microcontrollers. All demon-
stration software will operate within an open loop with
no speed regulation.
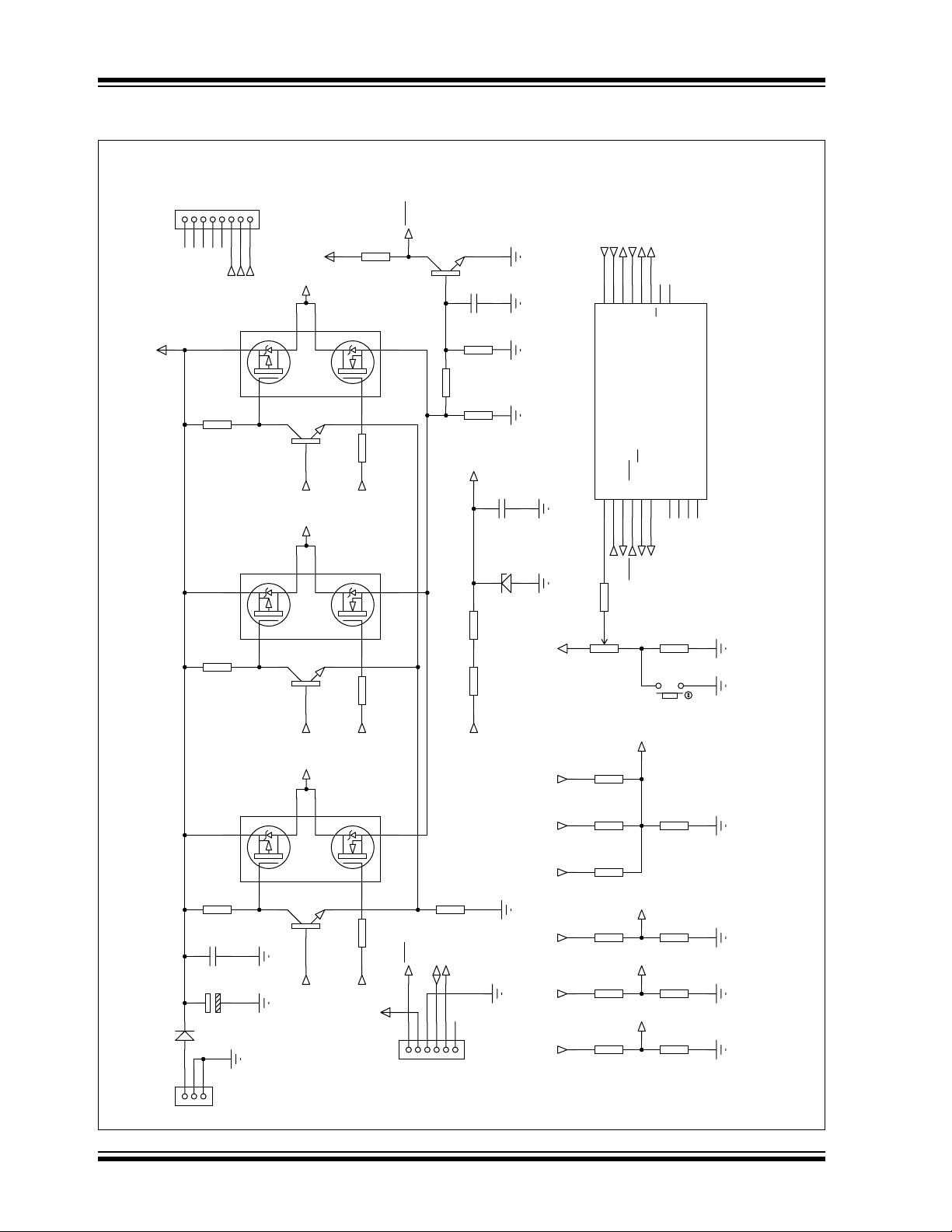
HARDWARE
The hardware for a BLDC system can be decomposed
into the following sections:
- Motor Power Drivers,
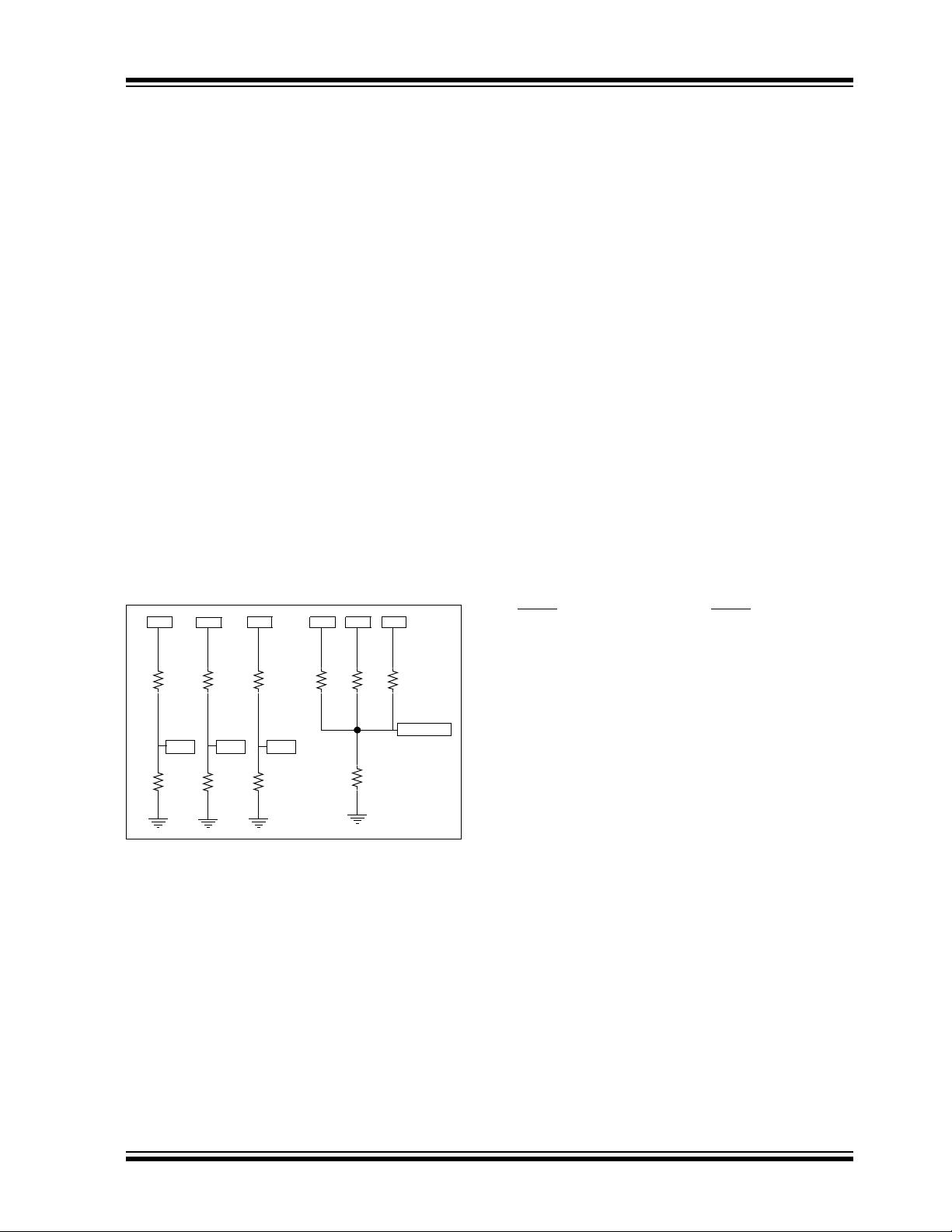
- Rotor position detection using back EMF
sensing
- Current Monitoring
- Microcontroller
- Microcontroller Power Supply
- Speed Set-point Input
Motor Power Driver
All BLDC motors require three half-bridge driver
stages. Each stage controls one phase of the motor, as
illustrated in Table 1 below:
Author: Joseph Julicher
Dieter Peter
Microchip Technology Inc.
Sensorless Brushless DC Motor Control with PIC16
剩余17页未读,继续阅读
资源评论













