PX4之uORB深入懂得和应用

The Instructions of uORB
『PX4/Pixhawk』 『软件体系结构』 『uORB』 『主题发布』 『主题订阅』
1 简介
1.1 PX4/Pixhawk 的软件体系结构
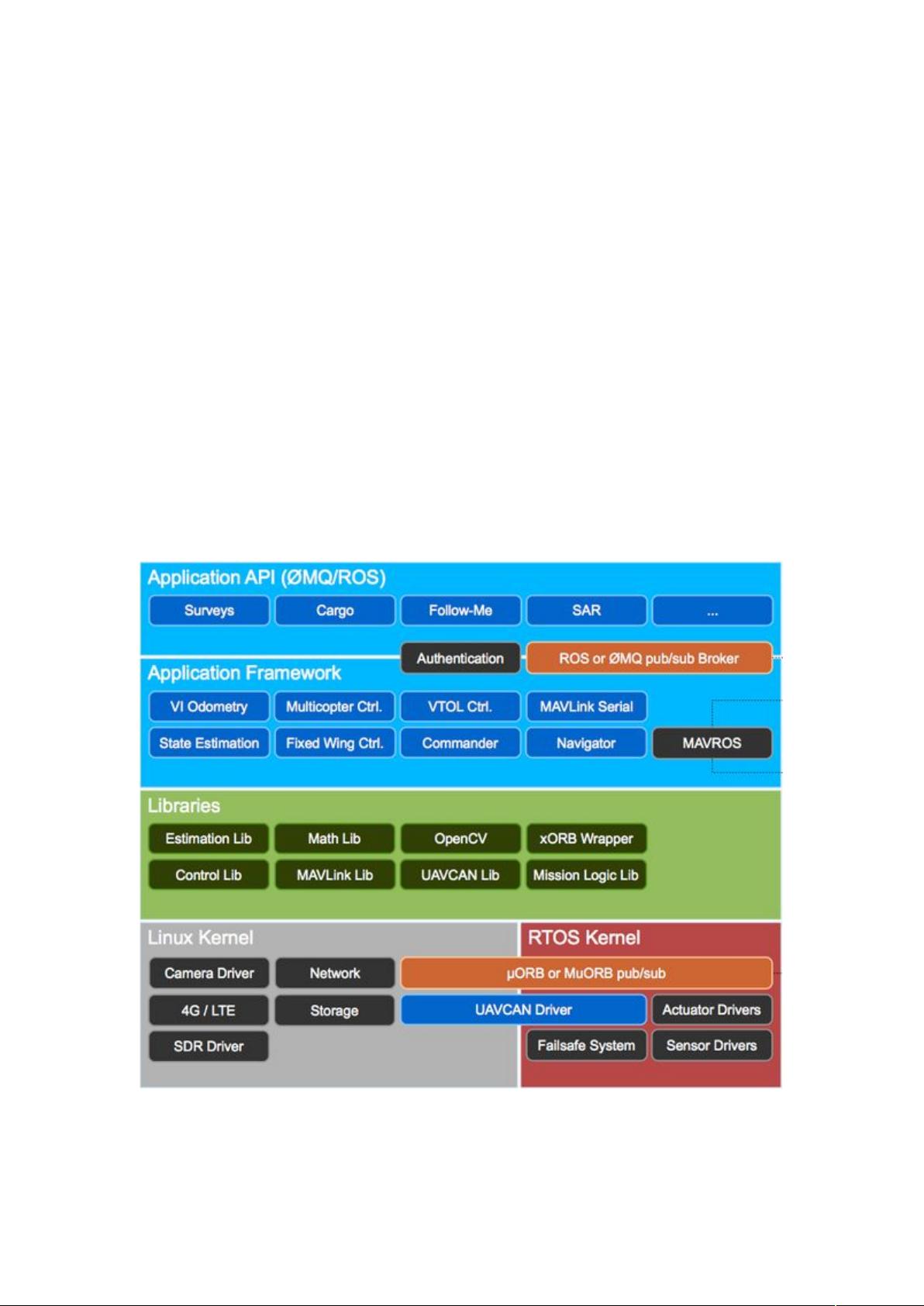
PX4/Pixhawk 的软件体系结构主要被分为四个层次,这可以让我们更好的理解
PX4/Pixhawk 的软件架构和运作:
应用程序的 API:这个接口提供给应用程序开发人员,此 API 旨在尽可能的精简、扁平及隐
藏其复杂性。
应用程序框架: 这是为操作基础飞行控制的默认程序集(节点)。
库: 这一层包含了所有的系统库和基本交通控制的函数。
操作系统: 最后一层提供硬件驱动程序,网络,UAVCAN 和故障安全系统
uORB(Micro Object Request Broker,微对象请求代理器)是 PX4/Pixhawk 系统中非常重要
且关键的一个模块,它肩负了整个系统的数据传输任务,所有的传感器数据、GPS、PPM 信
号等都要从芯片获取后通过 uORB 进行传输到各个模块进行计算处理。实际上 uORB 是一

剩余18页未读,继续阅读
资源评论

 良非2022-03-23写的很好
良非2022-03-23写的很好
 丐帮帮主乔峰2019-04-11该文档的内容翔实,绝对的货真价实
丐帮帮主乔峰2019-04-11该文档的内容翔实,绝对的货真价实












