TMC260步进电机驱动IC资料
需积分: 17 87 浏览量
2017-11-02
21:36:41
上传
评论
收藏 1.05MB PDF 举报

POWER DRIVER FOR STEPPER MOTORS INTEGRATED CIRCUITS
TRINAMIC Motion Control GmbH & Co. KG
Hamburg, Germany
TMC260 & TMC261 DATASHEET
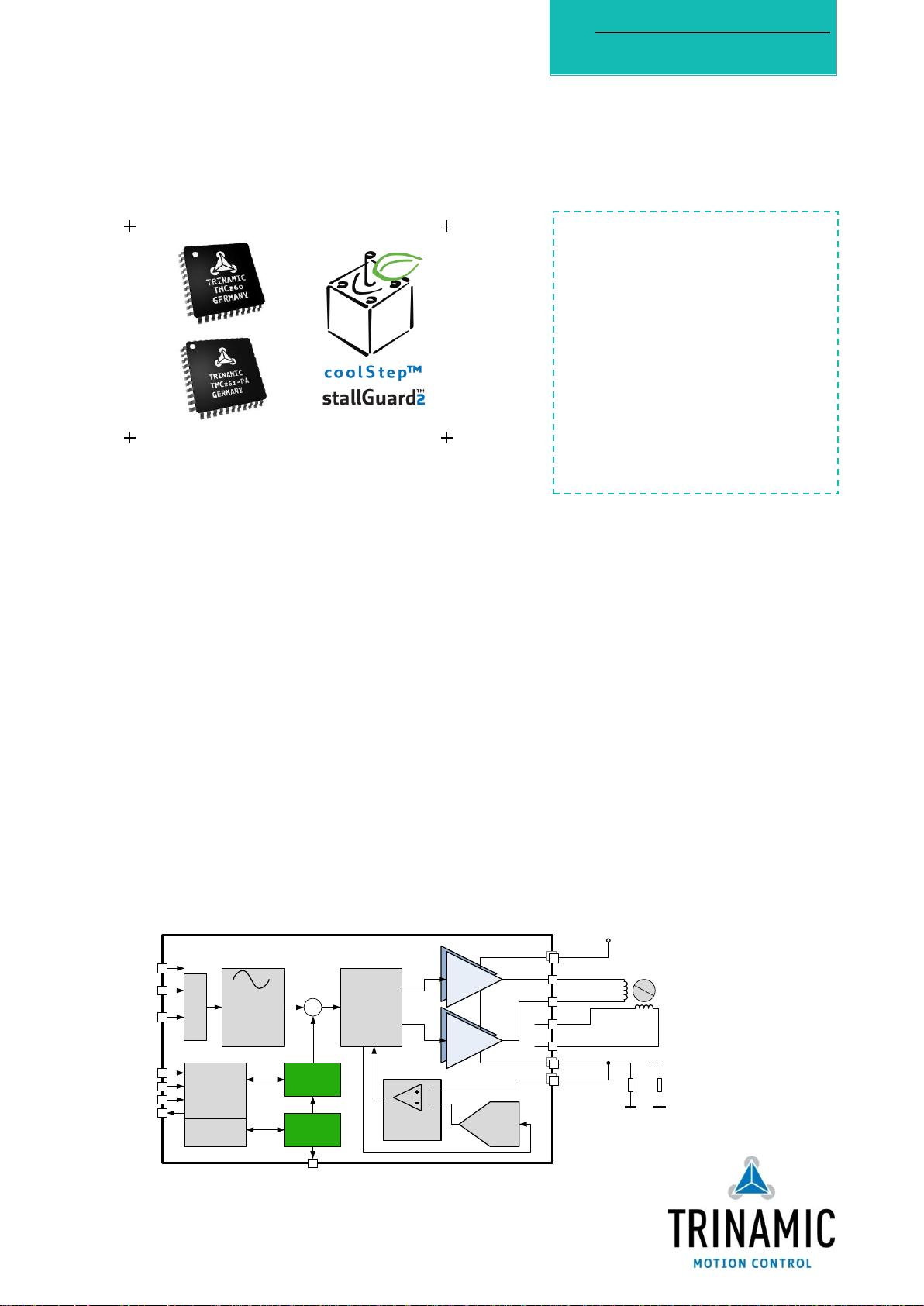
Half Bridge 2
Half Bridge 1
Half Bridge 1
Half Bridge 2
+V
M
VSA / B
2 x Current
Comparator
N
S
TMC260 / TMC261
RSA / B
Protection
& Diagnostics
Sine Table
4*256 entry
STEP
DIR
2 x DAC
SPI control,
Config & Diags
CSN
SCK
SDO
SDI
stallGuard2™
coolStep™
x
Step Multiplier
SG_TST
OA1
OA2
BRA / B
R
SENSE
R
SENSE
OB1
OB2
Chopper
VCC_IO
2 Phase
Stepper
BLOCK DIAGRAM
FEATURES AND BENEFITS
Drive Capability up to 2A motor current
Highest Voltage up to 60V DC (TMC261) or 40V DC (TMC260)
Highest Resolution up to 256 microsteps per full step
Compact Size 10x10mm QFP-44 package
Low Power Dissipation, low RDSON & synchronous
rectification
EMI-optimized programmable slope
Protection & Diagnostics overcurrent, short to GND,
overtemperature & undervoltage
stallGuard2™ high precision sensorless motor load detection
coolStep™ load dependent current control for energy savings
up to 75%
microPlyer™ microstep interpolation for increased
smoothness with coarse step inputs.
spreadCycle™ high-precision chopper for best current sine
wave form and zero crossing
APPLICATIONS
Textile, Sewing Machines
Factory Automation
Lab Automation
Liquid Handling
Medical
Office Automation
Printer and Scanner
CCTV, Security
ATM, Cash recycler
POS
Pumps and Valves
Heliostat Controller
CNC Machines
DESCRIPTION
The TMC260 and TMC261 drivers for two-
phase stepper motors offer an industry-
leading feature set, including high-
resolution microstepping, sensorless
mechanical load measurement, load-
adaptive power optimization, and low-
resonance chopper operation. Standard
SPI™ and STEP/DIR interfaces simplify
communication. Integrated power MOSFETs
handle motor currents up to 2A per coil.
Integrated protection and diagnostic
features support robust and reliable
operation. High integration, high energy
efficiency and small form factor enable
miniaturized designs with low external
component count for cost-effective and
highly competitive solutions.
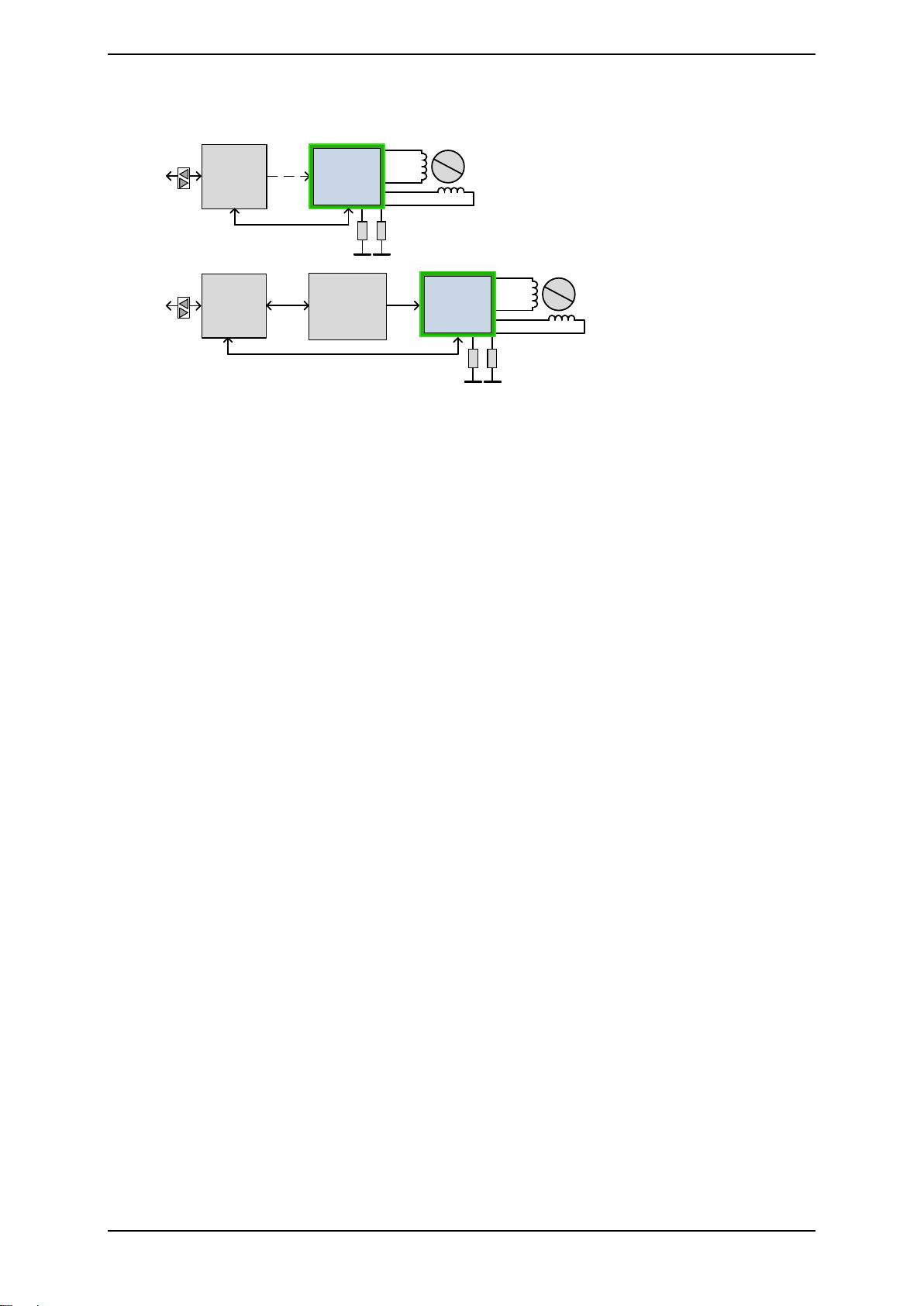
Universal, cost-effective stepper drivers for two-phase bipolar motors with state-of-the-art features.
Integrated MOSFETs for up to 2 A motor currents per coil. With Step/Dir Interface and SPI.
捷多邦,您值得信赖的PCB打样专家!



剩余52页未读,继续阅读
资源评论













