4R动机器人逆运动学—基于MATLAB
需积分: 44 88 浏览量
2018-08-05
15:12:35
上传
评论 8
收藏 904KB PDF 举报

4 is harder than 6:
Inverse kinematics for underactuated robots
Peter Corke
February 2014
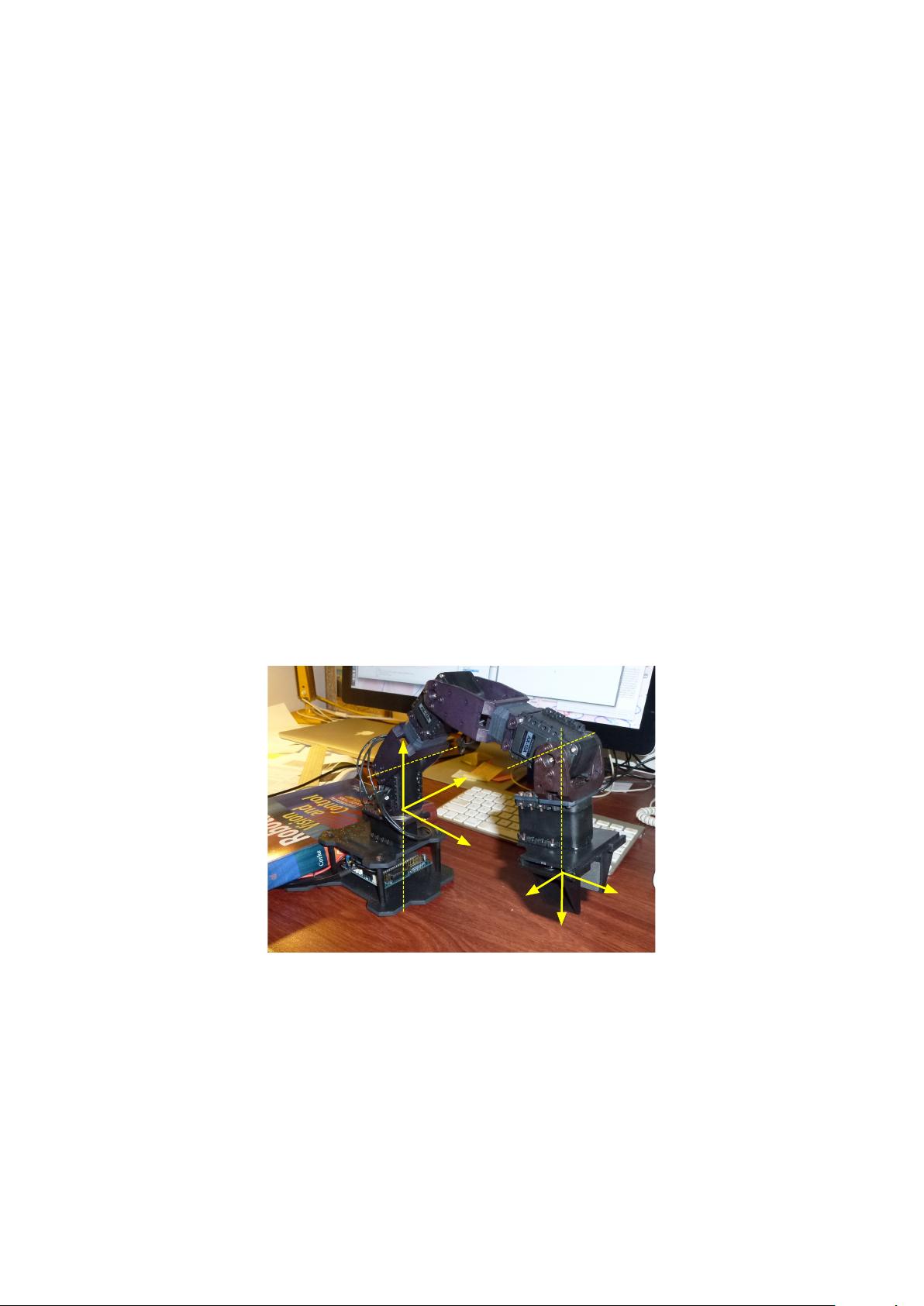
Many low-cost hobby class robots, such as shown in Figure 1 have only 4 joints
(degrees of freedom). This document describes how to determine inverse kinematics for
such a robot using the Robotics Toolbox[1] for MATL AB.
Underactuation complicates the process of finding an inverse kinematic solution, and
it frustrates those who are new to robotics — those who just want to run the code and
get an answer. For a robot with 6 joints it’s quite straightforward, but underactuation
requires some careful thought about the problem that you are trying to solve — you
can’t just blindly use the tools.
We will consider the problem in two parts. First the problem of moving the robot
tool to a particular position. Second, moving the tool to a particular position and tool
orientation.
z
t
y
t
x
t
x
0
y
0
z
0
Figure 1: The PhantomX robot sitting on my desk. The world frame {0} and the tool
frame {t} are shown. Note I’m using a book over the back feet to keep it from toppling
over.
1
资源评论













