PID算法之我见,详细讲解PID认知,让你上升一个新台阶

PID 算法之我见-段志杰 5/19/2020
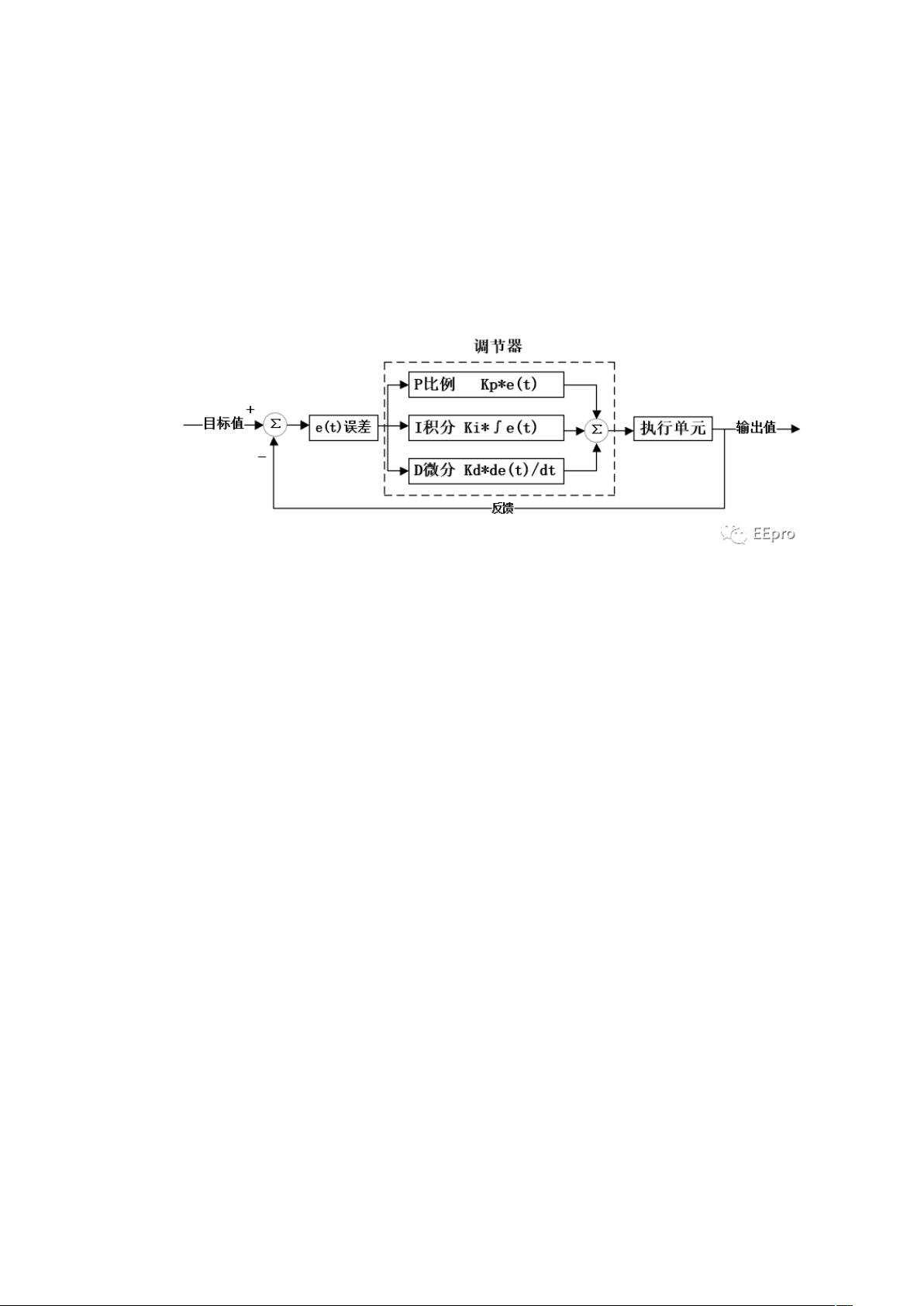
对于一套系统,有设定的目标值,也有控制对象实际输出值,当实际值与目标值不一
致时,两者之间产生的偏差称为误差值。PID 算法是一种根据偏差的比例、积分和微分进
行控制的算法,使得实际输出值趋近于目标值,这种控制过程简称 PID 控制。PID 控制是
系统控制理论中技术最成熟,应用最广泛的一种控制技术,结构简单,参数调整方便,是
在长期的工程实践中总结出来的一套控制方法。其结构如下图所示:
使用 PID 算法对一个控制对象(如倒立摆、四轴飞行器、平衡小车等)进行稳定控制 ,
除了需要对 PID 算法有比较清晰的理解,还需要一些单片机编程的基础,对于一个新手,
想通过动手实践的方式理解 PID 算法可能会感觉捉襟见肘,不知如何下手。在我看来,在
不通过动手实践的情况下,想要深刻理解 PID 算法,可以分解成两个部分去实现。
一、总体思路
① 第一部分:
就是纯粹的 PID 系统,不用管这个系统底层软硬件是怎么去实现的,仅站在理论的角
度去深刻理解 P、I、D 这三个参数的物理意义,以及调节这三个参数会产生什么样的效果。
② 第二部分:
此时不用去管 P、I、D 三个参数的物理意义,而是根据位置式或者增量式 PID 的理论
公式,使用单片机进行编程,去实现底层的这个 PID 系统。即将调节器的输出与执行单元
这个衔接环节做好。
③ 掌握第一第二部分之后:
此时第一部分中已经知道修改这三个参数后各会产生什么效果,第二部分将第一部分
中的操作落实到了具体的硬件操作,就是实现了一个衔接的过程。那么在后续对系统进行
参数调节时就不用再管底层硬件是一个什么情况,只需要看 P、I、D 参数调节后输出的变
化,根据上层的理论对参数进行优化。
因此不仅要对 PID 的上层理论深刻了解,这个容易做到,因为大部分的教材都是在讲
理论;更重要的是将上层与底层的这个衔接过程做好,这个过程完成好后,你就可以在上
层自由自在的大谈理论了。
二、总体思路中第一部分详解
①PID 算法中 P 参数的作用
控制规律为:






评论5
最新资源