ABB机器人通过直接输入法设置工具坐标系的具体方法和步骤.docx
版权申诉
24 浏览量
2023-01-25
13:47:18
上传
评论
收藏 3.68MB DOCX 举报

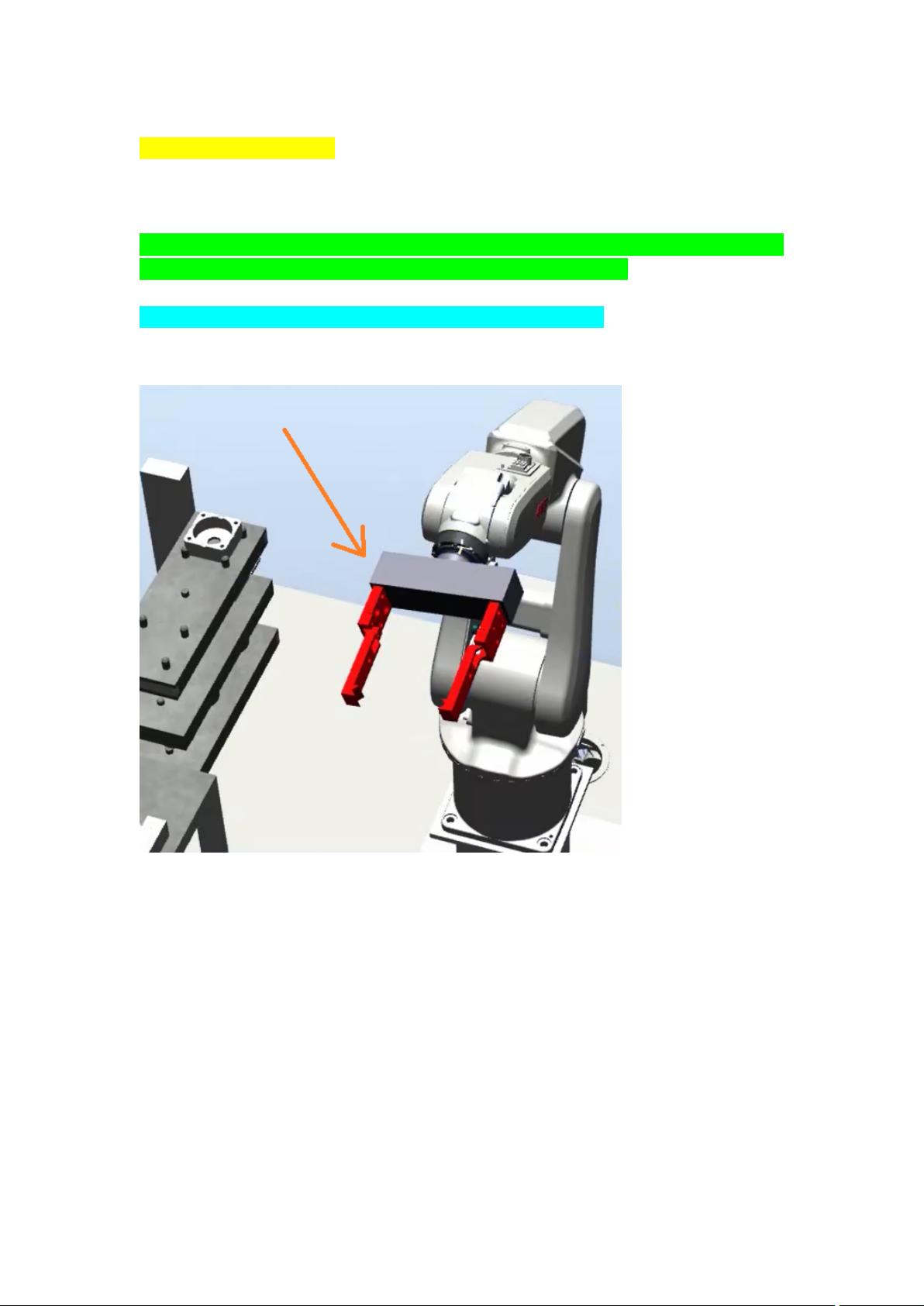
ABB 机器人通过直接输入法设置工具坐标系的具体方法和步骤
为什么要设置工具坐标系?
对于机器人来说,承受的负荷不同,各轴电机输出的电流和扭矩都会不同,错误地选用工具
坐标系会导致机器人各轴机械部位的加速磨损,严重的可能会损坏机器人核心减速机等部件。
对于形状规则或对称的工具,例如:长方体、夹爪等,容易得知工具的尺寸、重量或重心的,
可以采用直接输入法设置工具坐标系,简化工具坐标系的设置过程。
具体的设置步骤才参考以下内容(本次以一个夹爪为例进行说明):
如下图所示,此时机器人第 6 轴法兰盘末端安装了一个夹爪工具(前提:使用者已经知悉该
夹爪的几何尺寸、重量、重心等参数),
如下图所示,此时 TCP 点应从默认的法兰盘中心点偏移到夹爪工具的对称中心点,可以测
量出此时 Z 方向的偏移量为 215.30mm(X、Y 方向无偏移),
资源评论


AAA_自动化工程师
- 粉丝: 5765
- 资源: 3319

下载权益

C知道特权

VIP文章

课程特权
开通VIP











