如何在Vivado中建立工程-AXI IP
需积分: 16 170 浏览量
2014-06-19
16:11:17
上传
评论
收藏 2.49MB PDF 举报


Building ZRobot Hardware Project by
Vivado
Introduction
This article will explain how to build ZRobot hardware project by Vivado Design Suite, including tutorials
about adding user-defined IP, constructing your embedded system, synthesizing and generating
bitstreams. At last we will export the project into SDK and testify.
Goals and Perspectives
Through this article, you will learn to:
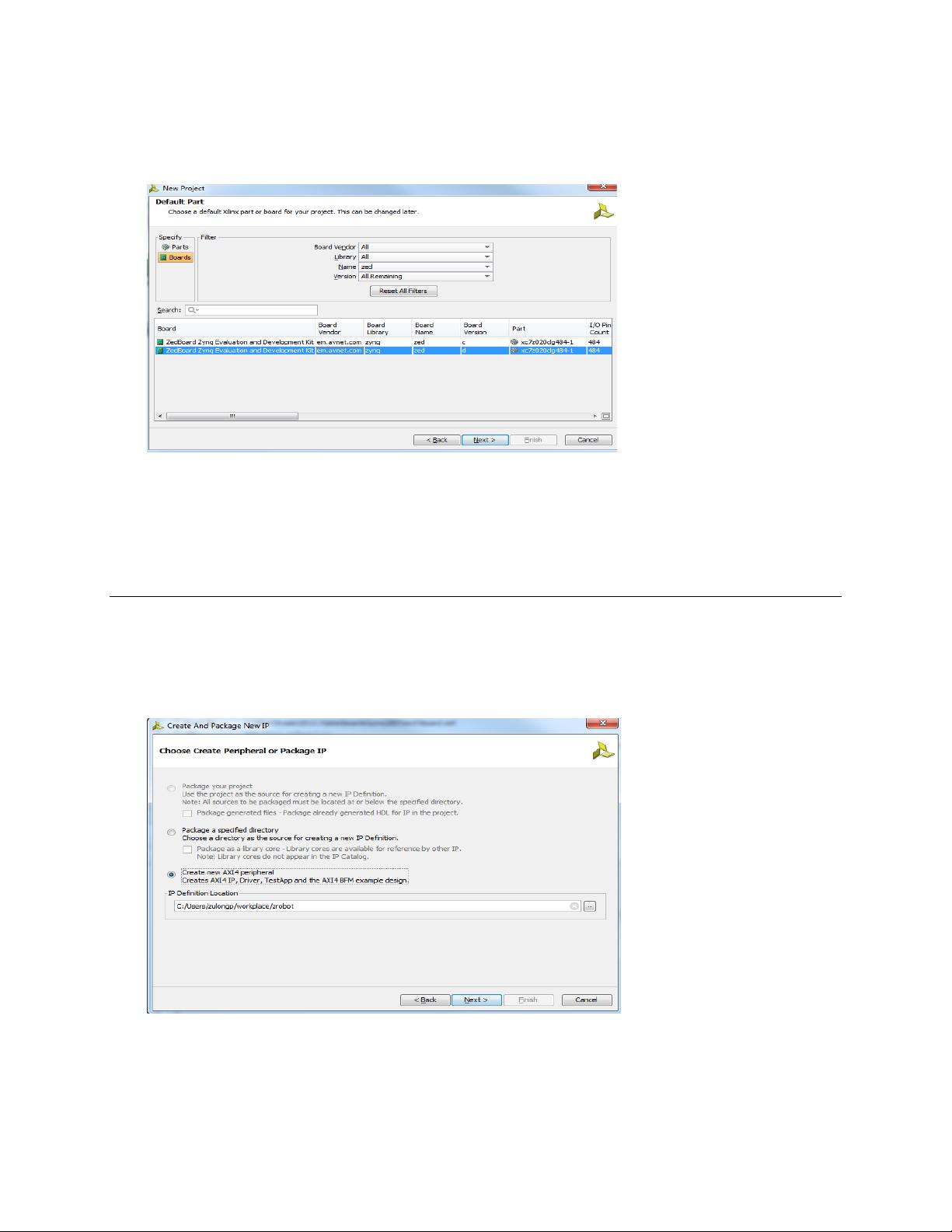
create a zedboard template in Vivado
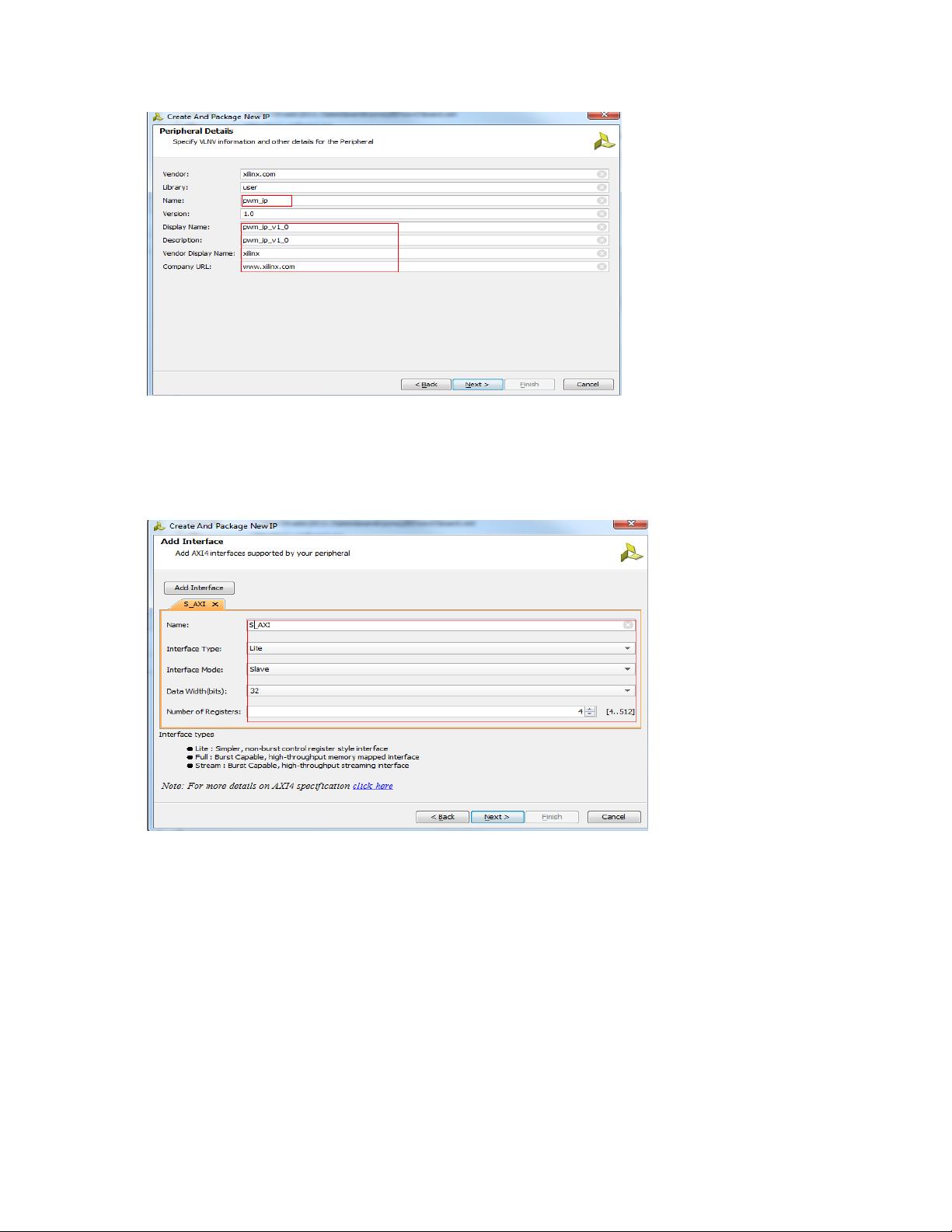
define your own IP cores
create your own bd
synthesize, constrain and generate a bitstream of your design
import your project into SDK for testing
Software and Hardware Environment
Vivado2013.3 Zrobot hardware materials SDK2013.2
Scheme
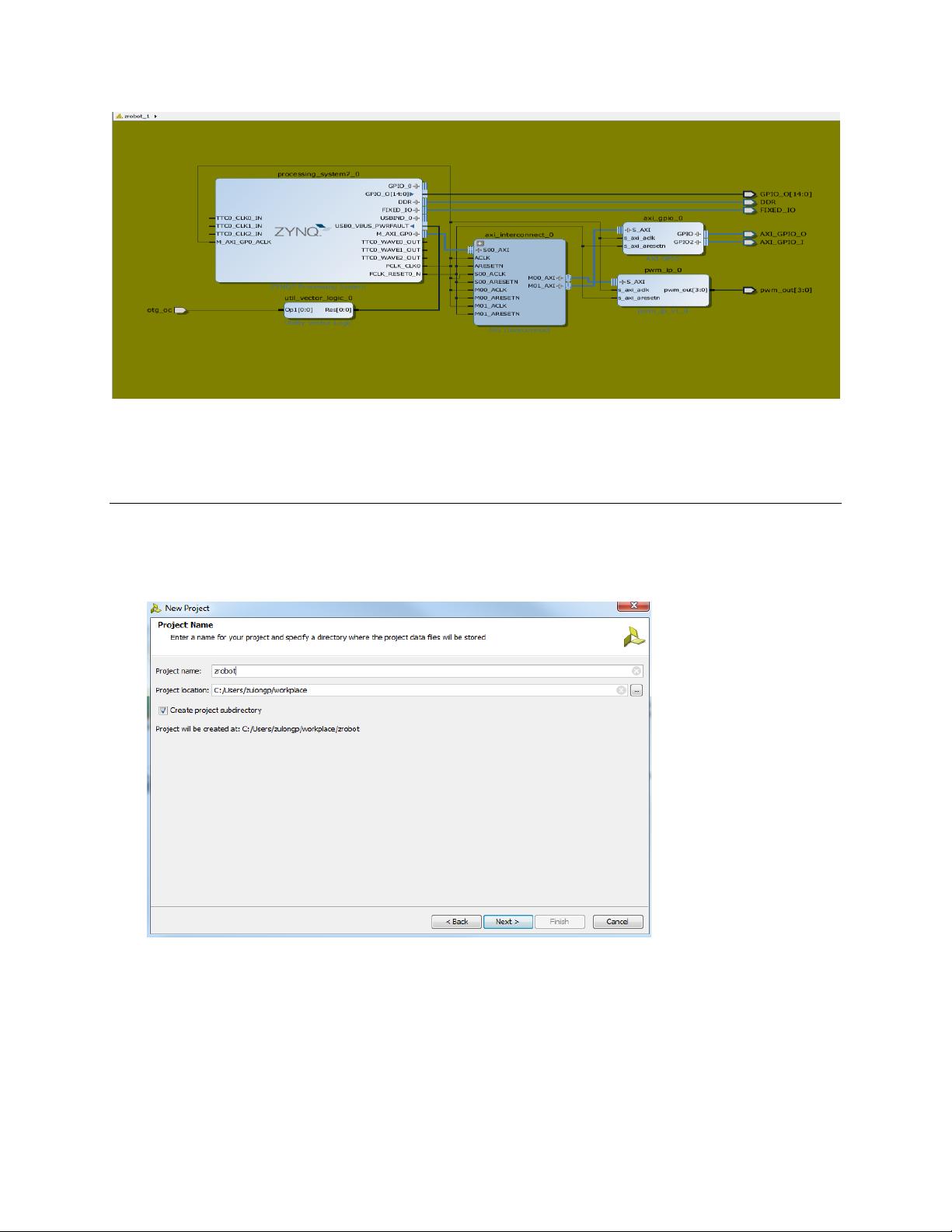
This article is based on ZRobot smart car. It implements a PWM module to control leds on zedboard as
an instance for demonstrating building your own embedded system in Vivado. The whole system
diagram is shown in Figure 1.

剩余23页未读,继续阅读
资源评论













