




2000-01-1543
HEV Control Strategy for Real-Time Optimization
of Fuel Economy and Emissions
Valerie H. Johnson, Keith B. Wipke and David J. Rausen
National Renewable Energy Laboratory
Copyright © 2000 Society of Automotive Engineers, Inc.
ABSTRACT
Hybrid electric vehicles (HEV’s) offer additional flexibility
to enhance the fuel economy and emissions of vehicles.
The Real-Time Control Strategy (RTCS) presented here
optimizes efficiency and emissions of a parallel
configuration HEV. In order to determine the ideal
operating point of the vehicle’s engine and motor, the
control strategy considers all possible engine-motor
torque pairs. For a given operating point, the strategy
predicts the possible energy consumption and the
emissions emitted by the vehicle. The strategy
calculates the “replacement energy” that would restore
the battery’s state of charge (SOC) to its initial level.
This replacement energy accounts for inefficiencies in
the energy storage system conversion process. User-
and standards-based weightings of time-averaged fuel
economy and emissions performance determine an
overall impact function. The strategy continuously
selects the operating point that is the minimum of this
cost function. Previous control strategies employed a
set of static parameters optimized for a particular drive
cycle, and they showed little sensitivity to subtle
emissions tradeoffs. This new control strategy adjusts
its behavior based on the current driving conditions.
Simulation results of the RTCS and of a static control
strategy on a PNGV-type baseline parallel HEV (42 kW
engine and a 32 kW motor) using ADVISOR are
presented. Comparison of the simulations demonstrates
the flexibility and advantages of the RTCS. Compared
to an optimized static control strategy, the RTCS
reduced NOx emissions by 23% and PM emissions by
13% at a sacrifice of only 1.4% in fuel economy.
INTRODUCTION
Prior HEV control strategies have used a static approach
to control the vehicle operation and they have typically
focused on improving fuel economy rather than
emissions [1-3]. The approach presented here
considers dynamic vehicle operating conditions that
affect both fuel economy and emissions.
In 1994, the Center for Transportation Technologies and
Systems at the National Renewable Energy Laboratory,
a Department of Energy (DOE) Laboratory, developed a
vehicle simulation tool called ADVISOR. DOE continues
to refine and support this tool. Development of control
strategies to address the specialized needs of hybrid
vehicles evolved from this work. Simulations based on
steady state fuel and emissions maps showed that there
was a tradeoff between energy efficiency and low
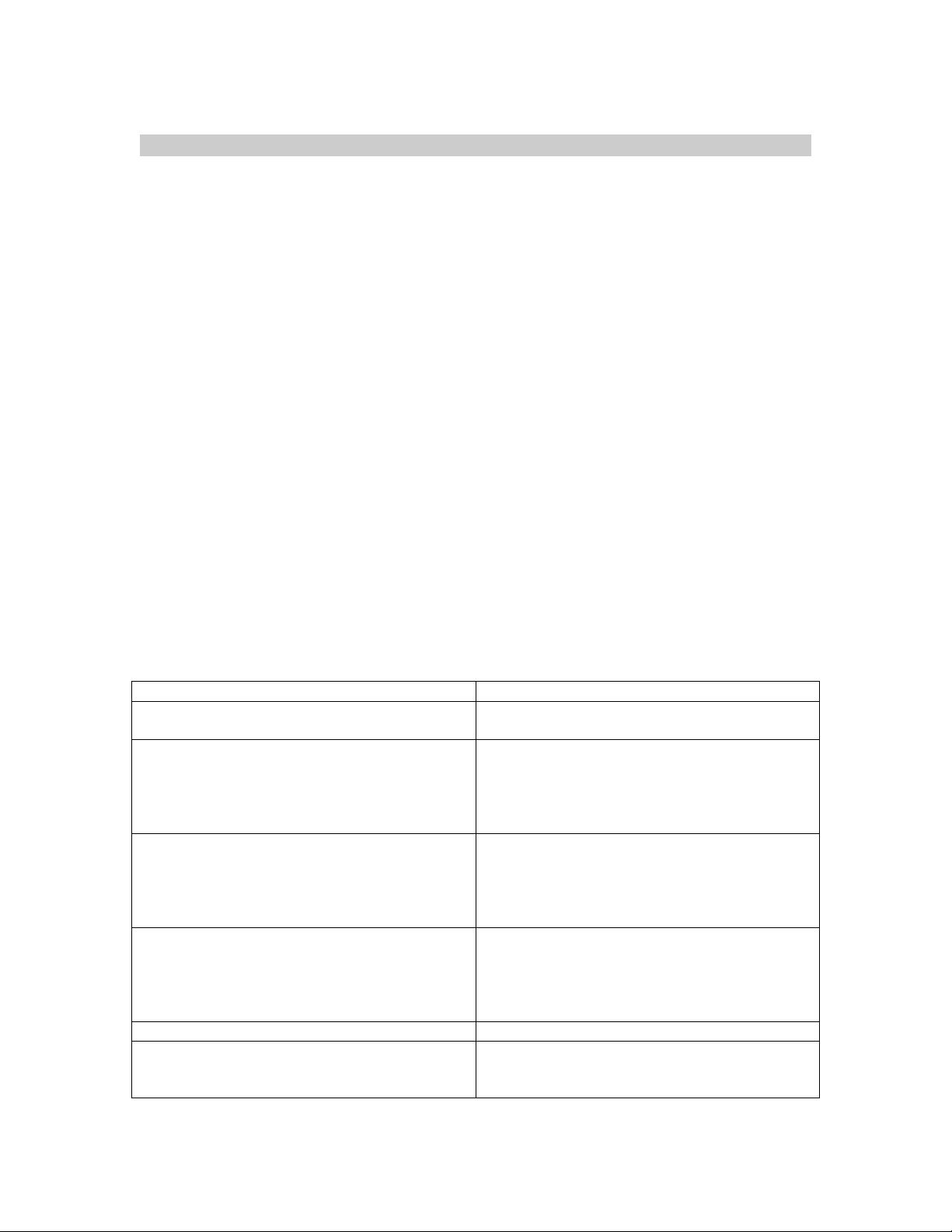
emissions. Figure 1 shows a schematic of desired
operating locations on a compression-ignition, direct-
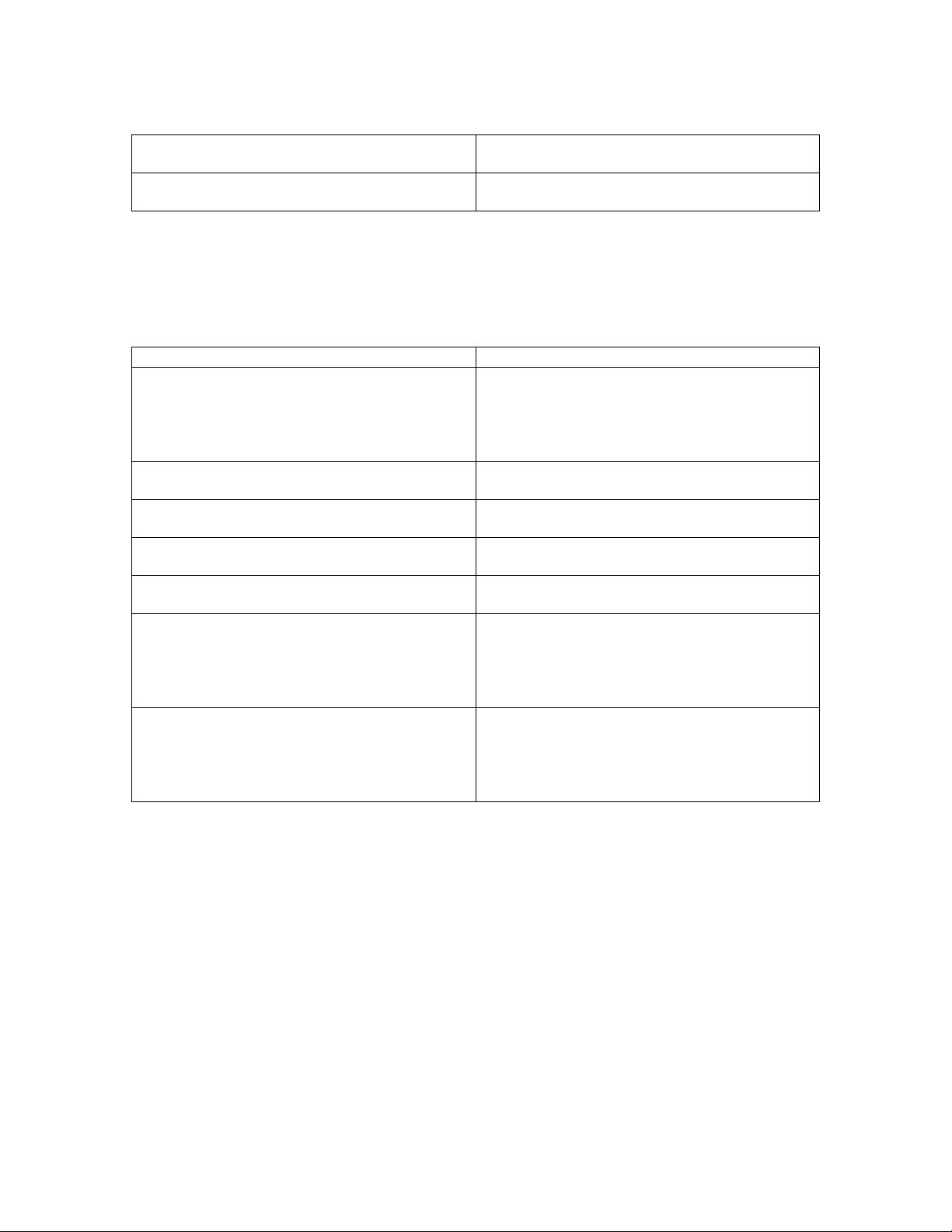
injection (CIDI) engine map. For a spark ignition (SI)
engine, the desired operating locations may be different,
as shown in Figure 2.
1000 1500 2000 2500 3000 3500 4000
0
20
40
60
80
100
120
140
160
180
200
Engine Torque (Nm)
En
g
ine S
p
eed
(
r
p
m
)
High
MPG
Low
PM
Low
HC,CO
Low
NOx
Figure 1: Fuel economy and emissions tradeoffs for
a CIDI engine
1000 1500 2000 2500 3000 3500 4000
0
20
40
60
80
100
120
140
160
180
200
Engine Torque (Nm)
En
g
ine S
p
eed
(
r
p
m
)
High
MPG
Low
CO
Low
HC
Low
NOx
Figure 2: Fuel economy and emissions tradeoffs for
an SI engine













- 1
- 2
- 3
- 4
- 5
- 6
前往页