You will be hard pressed to find a DSP engineer who designs a digital filter by any means
other than firing up the filter design package on a work station, clicking on a few menu
tabs, entering the filter response required, and then waiting about 10 seconds for the
design to be completed. Multi-coloured graphs showing gain, phase, group delay, impulse
response, number of days shopping left until Christmas, etc, all appear, together with the
filter coefficients, and indeed C or assembler code for your favourite processor (assuming
you have paid for this option!) ready to link into your program.
So, you may well ask, why devote a whole toolbox to digital filter design, if the process
is so straightforward? The answer is that the small number of menu clicks and design
parameters to be entered in the CAD package, are laden with choice. These choices can
have a very significant impact on the performance of the resulting filter as well as influ-
encing how much program and data memory it requires, how many processing cycles it
needs, how stable it is, how accurate it is, and a few other things besides. This ToolBox
thus begins by explaining as briefly as possible what these options are and how to choose
between them.
We then make the assumption that you will be rushing out to buy (well, acquire) a top
of the range filter design package to try all this out for yourself, and therefore give a quick
run through the current options in the market. We could of course be wrong, and you
have a burning desire to design filters by hand. Don’t despair, all the theory you need is in
Chapter 9. (Students who are obliged to learn the theory should not despair – it is bound
to come in handy sometime.)
In the final section, we take a look at some specialist filters that have become favourites
of DSP designers all over the world. They allow clever things to be done with less memory,
fewer cycles, or better response than the standard approaches.
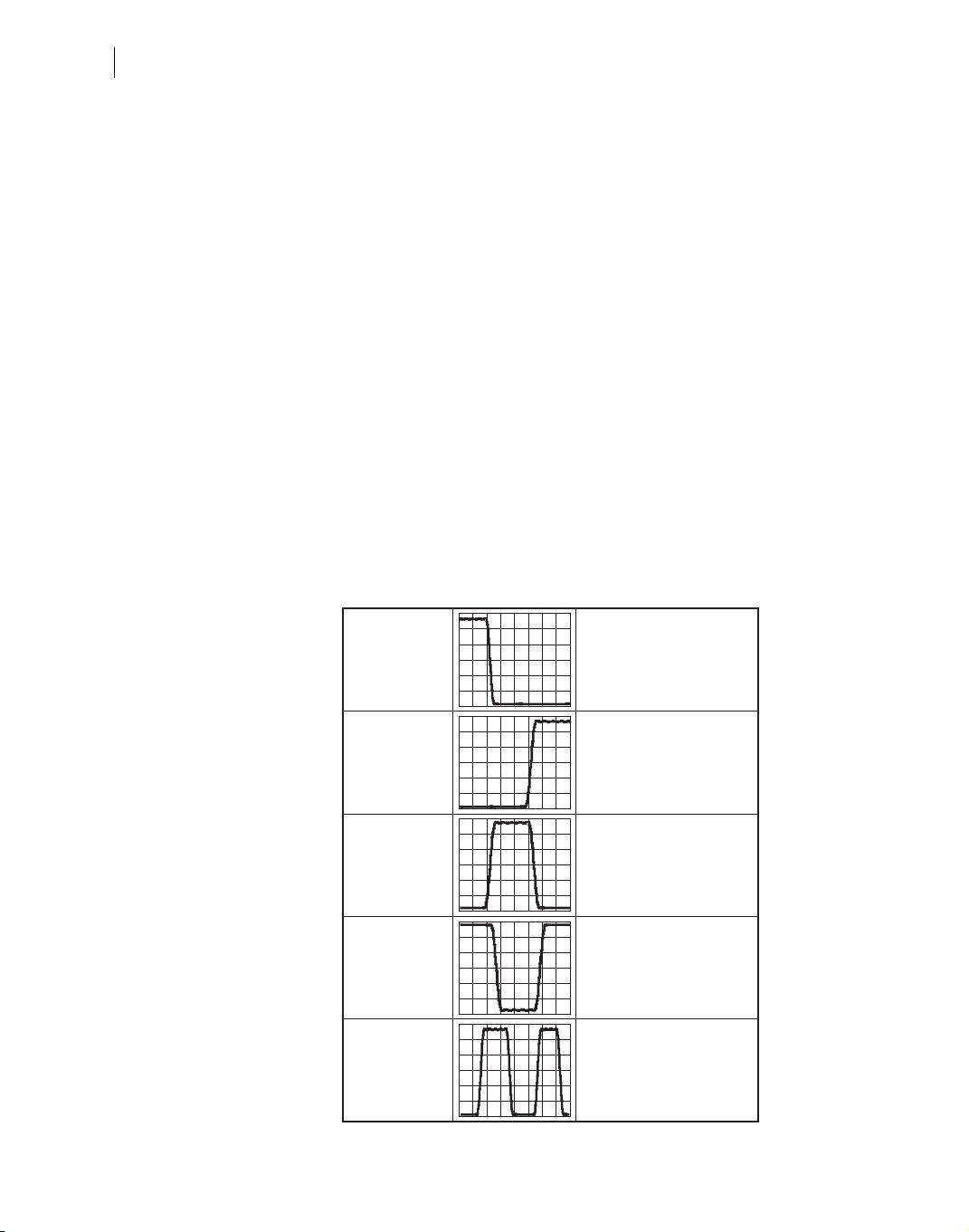
Whether designing a conventional analogue or state-of-the-art digital filter, the first deci-
sion is which type of filter is needed – lowpass, bandpass, highpass, etc. Usually this is self
evident from the application, but with the added flexibility of digital filtering, it is worth
giving this process a little more thought.
For example, suppose you are designing a voice scrambler for covert operations, and
you need to limit the high frequency content to below 3 kHz in order to keep the sampling
rate below 8 kHz. Simple you say, a low pass filter with 3 kHz cut off is needed. However,
there is DC offset on the input sampled signal arising in the A/D converter, which must be
removed as you will be using a mixing process to achieve the scrambling and any DC
component will result in an annoying tone in the audio. OK, so a bandpass filter, say from
Introduction 6.1
General filter design options 339
Basic filter types 6.2.1
General filter design options 6.2


 yinuo999942013-05-14恩 英文的 还不错
yinuo999942013-05-14恩 英文的 还不错











