ABB伺服焊枪配置.pdf
需积分: 42 198 浏览量
2020-01-12
08:57:51
上传
评论 8
收藏 1.59MB PDF 举报

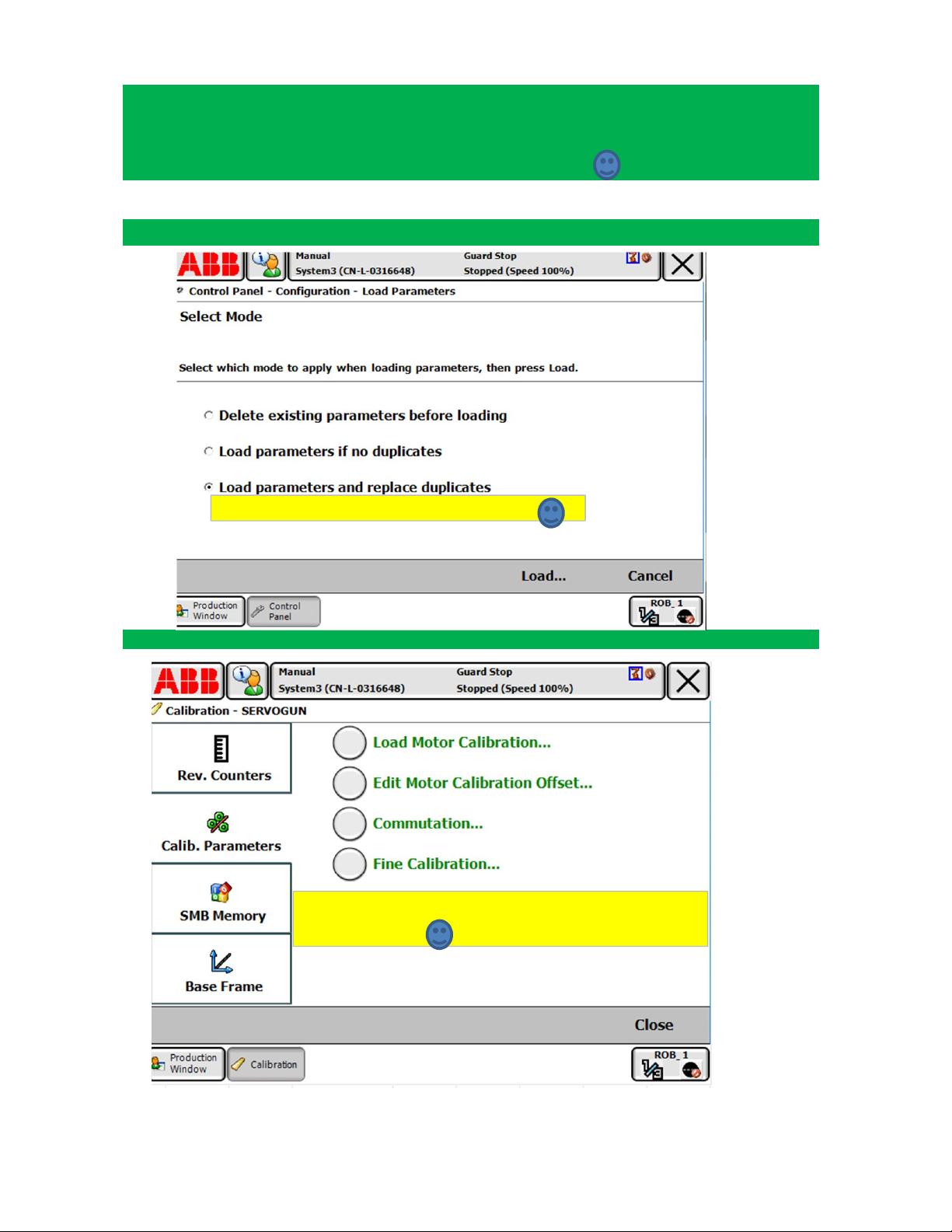
1.将配置文件导入机器人(不同型号的马达需要导入不同的 MOC,接触到的3种马达,8C 9C 宝德)
准备工作说明:1.配置调试焊枪马达前,事前将现场的程序进行备份2.将需要替换的马达安装好,注
意马达皮带的张力,安装工作完毕后配置新马达的参数。3.将配置OK的MOC文档替换备份中的MOC。
(检验配置是否正确的方法,就是看给定的压力能否在压力器上正确的输出)
配置流程
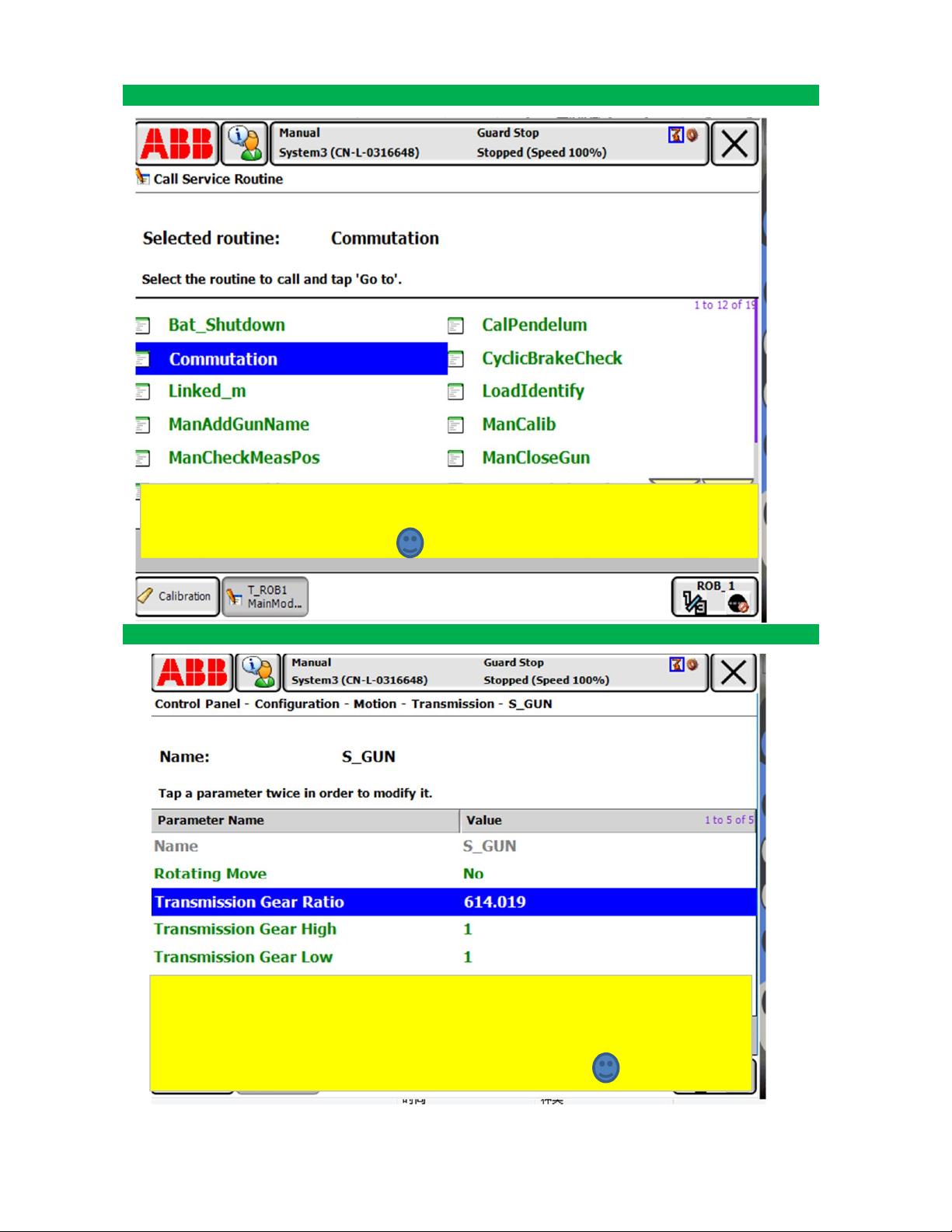
2. Fine Calibrate;
例如,9C的马达将MOC文档加载后,重启机器人。
更换马达后,需要更新 Fine Calibration.(手动JOG,不可以
移动焊枪,可执行此步)

剩余15页未读,继续阅读
资源评论













