AVR446步进电机加速算法


AVR446: Linear speed control of stepper motor
Features
• Linear speed control of stepper motor
- Control of acceleration, deceleration, max speed and number of steps to move
• Driven by one timer interrupt
• Full- or half-stepping driving mode
• Supports all AVR® devices with 16bit timer
• Demo application for ATmega48 running on 3,68MHz, with serial interface on 19200
8/N/1.
1 Introduction
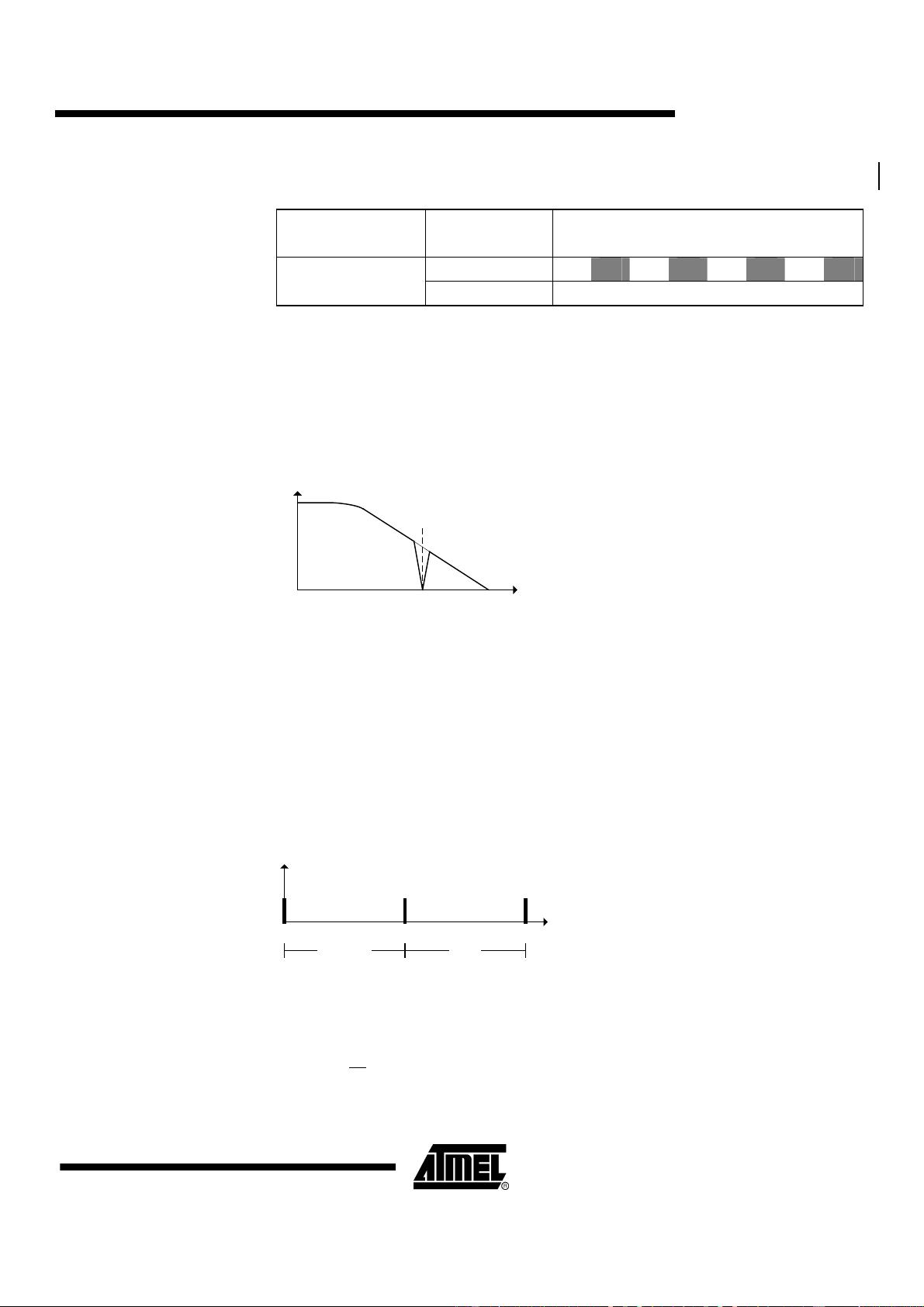
This application note describes how to implement an exact linear speed controller
for stepper motors. The stepper motor is an electromagnetic device that converts
digital pulses into mechanical shaft rotation. Many advantages are achieved using
this kind of motors, such as higher simplicity, since no brushes or contacts are
present, low cost, high reliability, high torque at low speeds, and high accuracy of
motion. Many systems with stepper motors need to control the acceleration/
deceleration when changing the speed. This application note presents a driver with
a demo application, capable of controlling acceleration as well as position and
speed.
This linear speed controller is based on an algorithm presented in ‘Embedded
Systems Programming’ January 2005, ‘Generate stepper-motor speed profiles in
real time’ an article by D. Austin. This algorithm allows parameterization and
calculation in real time, using only simple fixed-point arithmetic operations and no
data tables.
Figure 1-1. Stepper motors
8-bit
Microcontrollers
Application Note
Rev. 8017A-AVR-06/06
剩余14页未读,继续阅读
资源评论

 JarryCmt2018-04-29不错的资料,值得学习
JarryCmt2018-04-29不错的资料,值得学习 幸福良子2017-09-18资源还是挺有帮助的
幸福良子2017-09-18资源还是挺有帮助的

ATerrior
- 粉丝: 3
- 资源: 16









最新资源
- 什么是移动应用开发-关于移动应用开发的相关介绍
- 第二组汇报 PPT.pptx
- 什么是大数据开发-相关介绍-关于大数据开发的相关介绍
- 什么是软件测试-相关介绍-关于软件测试的相关介绍
- 前端开发-什么是前端开发-关于前端开发的一些相关介绍
- Sora AI-关于文生视频的使用场景说明
- suno AI文生视频的相关教程和介绍使用
- 什么是后端开发-关于后端开发的一些小介绍分享
- Jurassic Pack Vol. II Dinosaurs 侏罗纪包卷恐龙二号Unity游戏模型资源unitypackage
- Jurassic Pack Vol. III Dinosaurs 侏罗纪包卷恐龙三号Unity游戏模型资源unitypackag
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


