1
Modeling a System
Train System
In this example, we will consider a toy train consisting of an engine and a car. Assuming that the train only travels in
one direction, we want to apply control to the train so that it has a smooth start-up and stop, along with a constant-
speed ride.
The mass of the engine and the car will be represented by M1 and M2, respectively. The two are held together by a
spring, which has the stiffness coefficient of k. F represents the force applied by the engine, and the Greek letter, mu
(which will also be represented by the letter u), represents the coefficient of rolling friction.
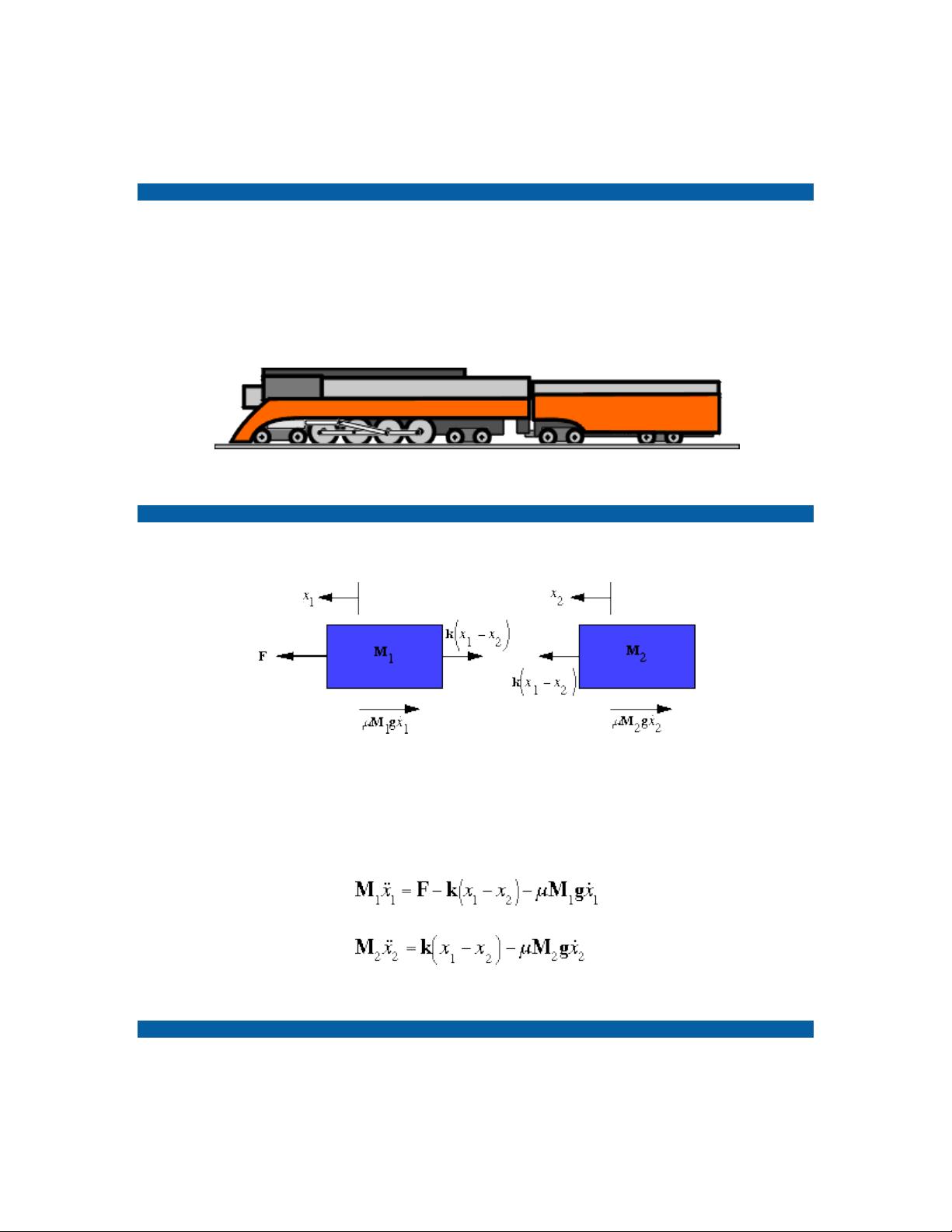
Free Body Diagram and Newton's Law
The system can be represented by following Free Body Diagrams.
Figure 1: Free Body Diagrams
From Newton's law, you know that the sum of forces acting on a mass equals the mass times its acceleration. In this
case, the forces acting on M1 are the spring, the friction and the force applied by the engine. The forces acting on M2
are the spring and the friction. In the vertical direction, the gravitational force is canceled by the normal force applied
by the ground, so that there will be no acceleration in the vertical direction. The equations of motion in the horizontal
direction are the following:
State-variable and Output Equations
This set of system equations can now be manipulated into state-variable form. The state variables are the positions,
X1 and X2, and the velocities, V1 and V2; the input is F. The state variable equations will look like the following: