基于PLC的太阳能系统控制设计


目 录
1. 绪论....................................................................................................................3
1.1. 太阳能自动跟踪系统概述......................................................................3
1.1.1. 压差式太阳能跟踪器....................................................................3
1.1.2. 控放式太阳跟踪器........................................................................3
1.1.3. 时钟式跟踪器................................................................................3
1.1.4. 比较控制式太阳跟踪器................................................................4
1.2. 太阳能自动跟踪系统的研究现状和发展趋势......................................4
1.2.1. 光电跟踪........................................................................................4
1.2.2. 视日运动轨迹跟踪........................................................................4
1.3. 本设计的主要内容..................................................................................6
2. 太阳能自动跟踪系统的运动分析....................................................................7
2.1. 现有系统的运动方式..............................................................................7
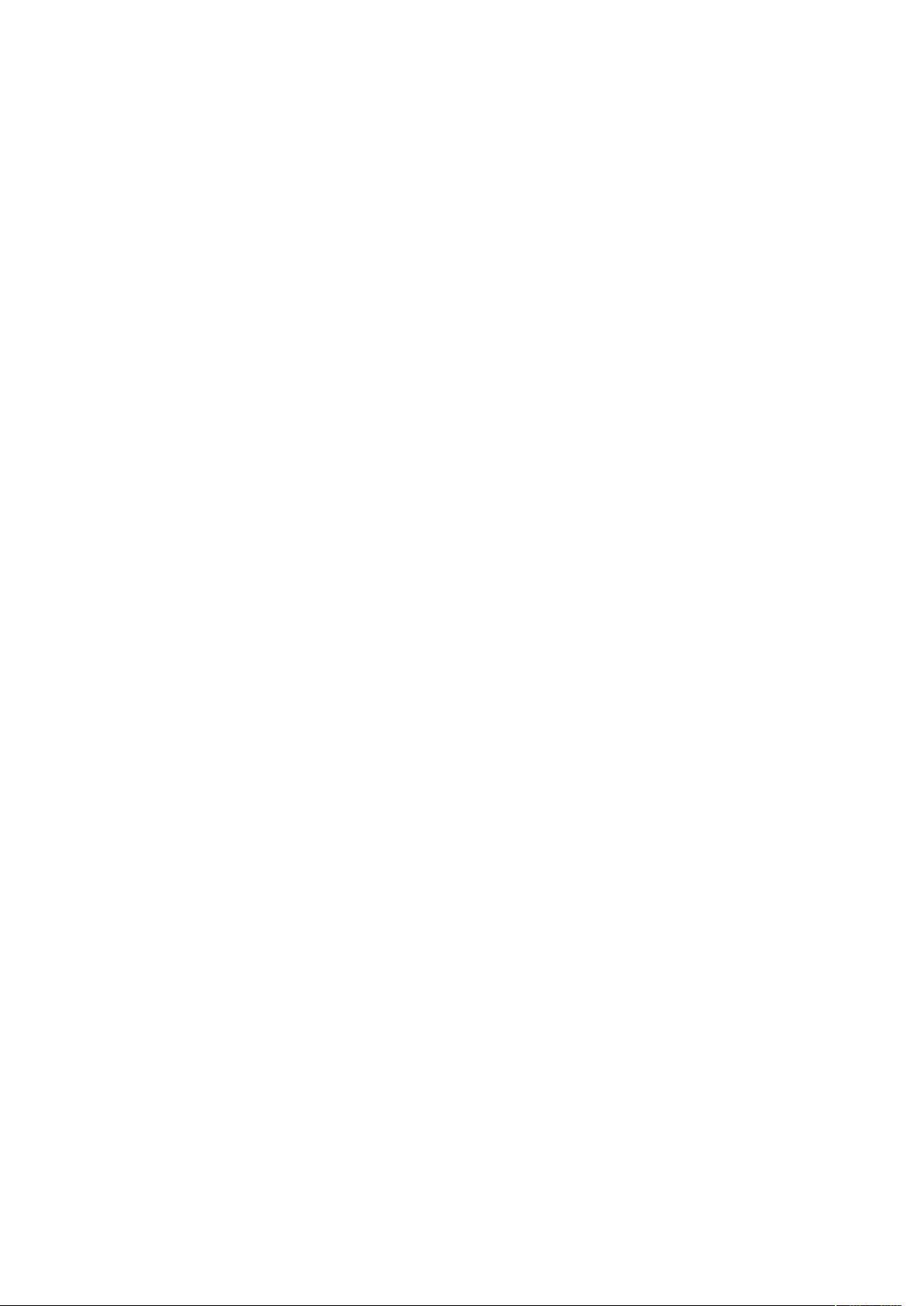
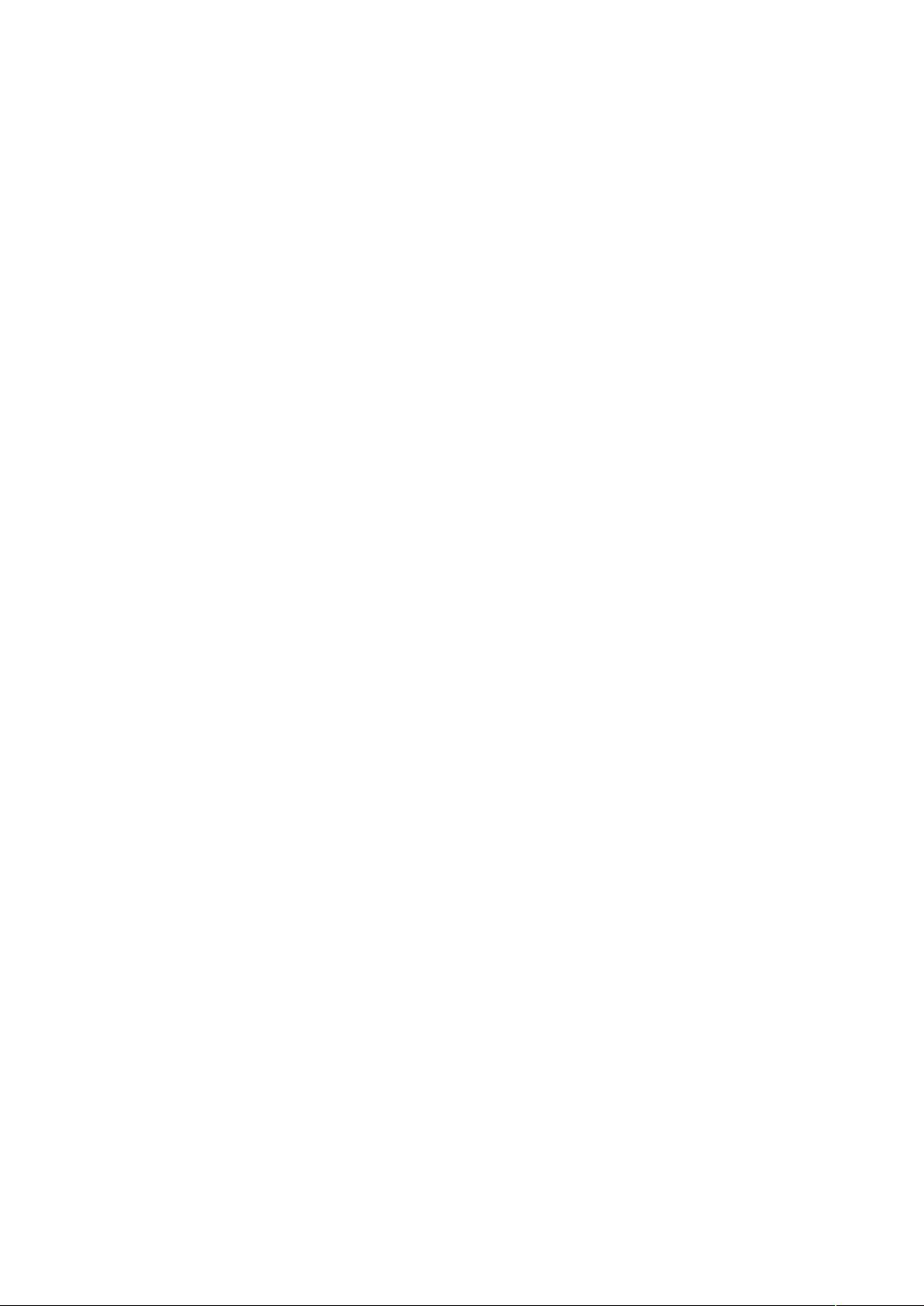
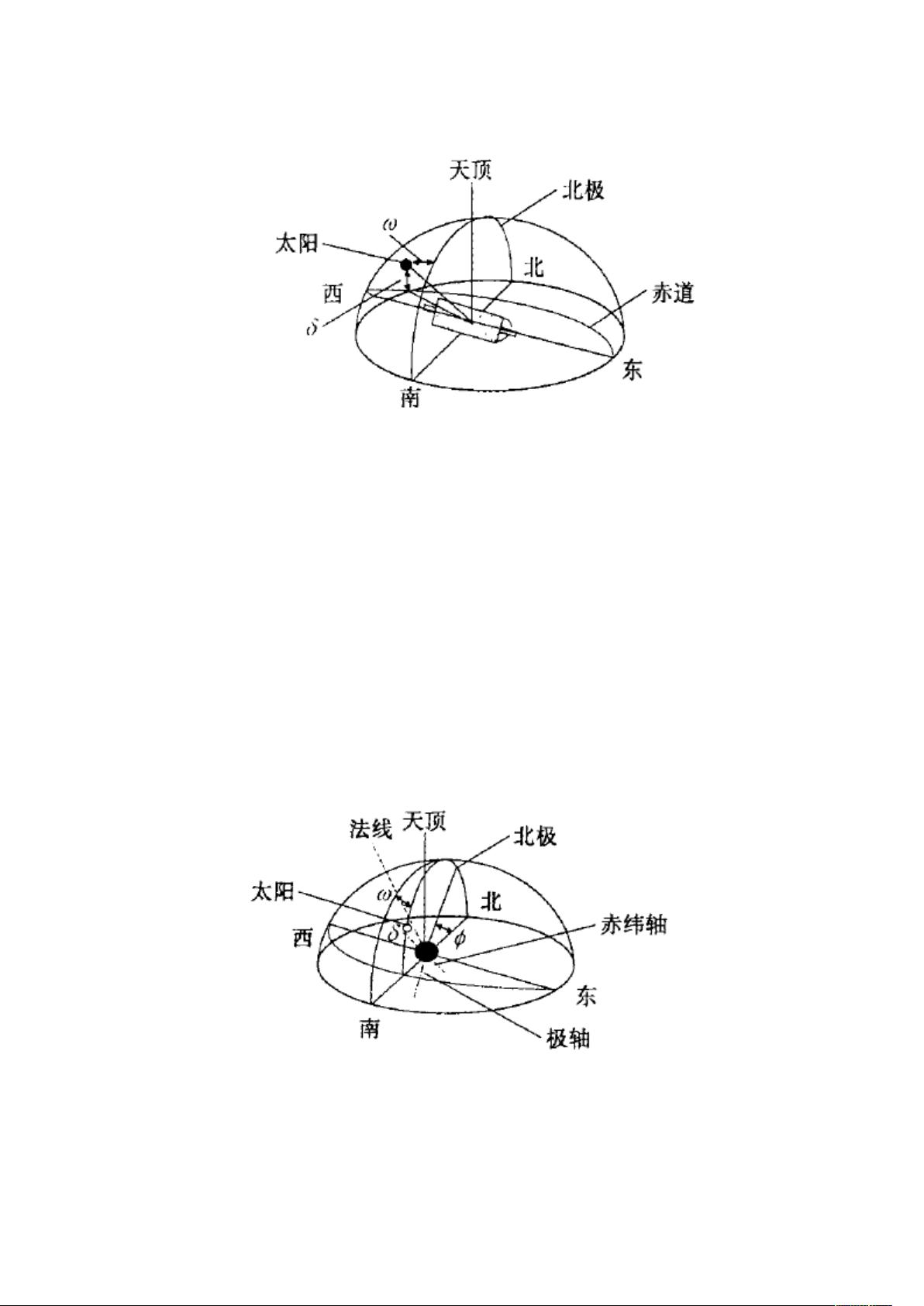
2.1.1. 地平坐标系跟踪方法的应用........................................................7
2.2. 现有执行机构的结构..............................................................................9
2.2.1. 立柱转动式跟踪器........................................................................9
2.2.2. 陀螺仪式跟踪器..........................................................................10
2.2.3. 齿圈转动跟踪器..........................................................................11
2.3. 球面 3 自由度并联结构........................................................................11
2.3.1. 球面三个基本概念......................................................................11
2.3.2. 球面多边形的三角公式..............................................................13
2.3.3. 三自由度并联球面机构分析......................................................13
2.3.4. 球面三自由度并联结构分析......................................................14
2.3.5. 球面 3 自由度并联结构..............................................................15
3. 太阳能自动跟踪系统的结构设计..................................................................16
3.1. 检测装置的设计....................................................................................16
3.1.1. 传感器定义..................................................................................16
3.1.2. 光电传感器..................................................................................16
3.2. 传动系统的设计....................................................................................18
3.3. 步进电机的选择....................................................................................19
3.3.1. 步进电机概述..............................................................................19
3.3.2. 步进电机型号的选择..................................................................19
4. 太阳能自动跟踪系统的控制..........................................................................21
4.1. 控制系统概述........................................................................................21
4.1.1. 自动控制系统..............................................................................21
4.1.2. 单片机控制系统..........................................................................22
4.1.3. 太阳能跟踪器的控制..................................................................23
4.2. AT89c51 单片机概述.............................................................................23
4.2.1. 单片机定义..................................................................................23
4.2.2. 单片机内部结构与功能..............................................................24
4.2.3. 单片机的工作方式和振荡器......................................................28
4.3. 控制系统接线图....................................................................................29
4.4. 步进电机的控制....................................................................................30

剩余43页未读,继续阅读
资源评论

 lg1372602014-08-27能用,有参考价值。
lg1372602014-08-27能用,有参考价值。











