3
本资料仅限东风柳汽商用车内部使用
© 2009-2013-9-11
HiRain Technologies
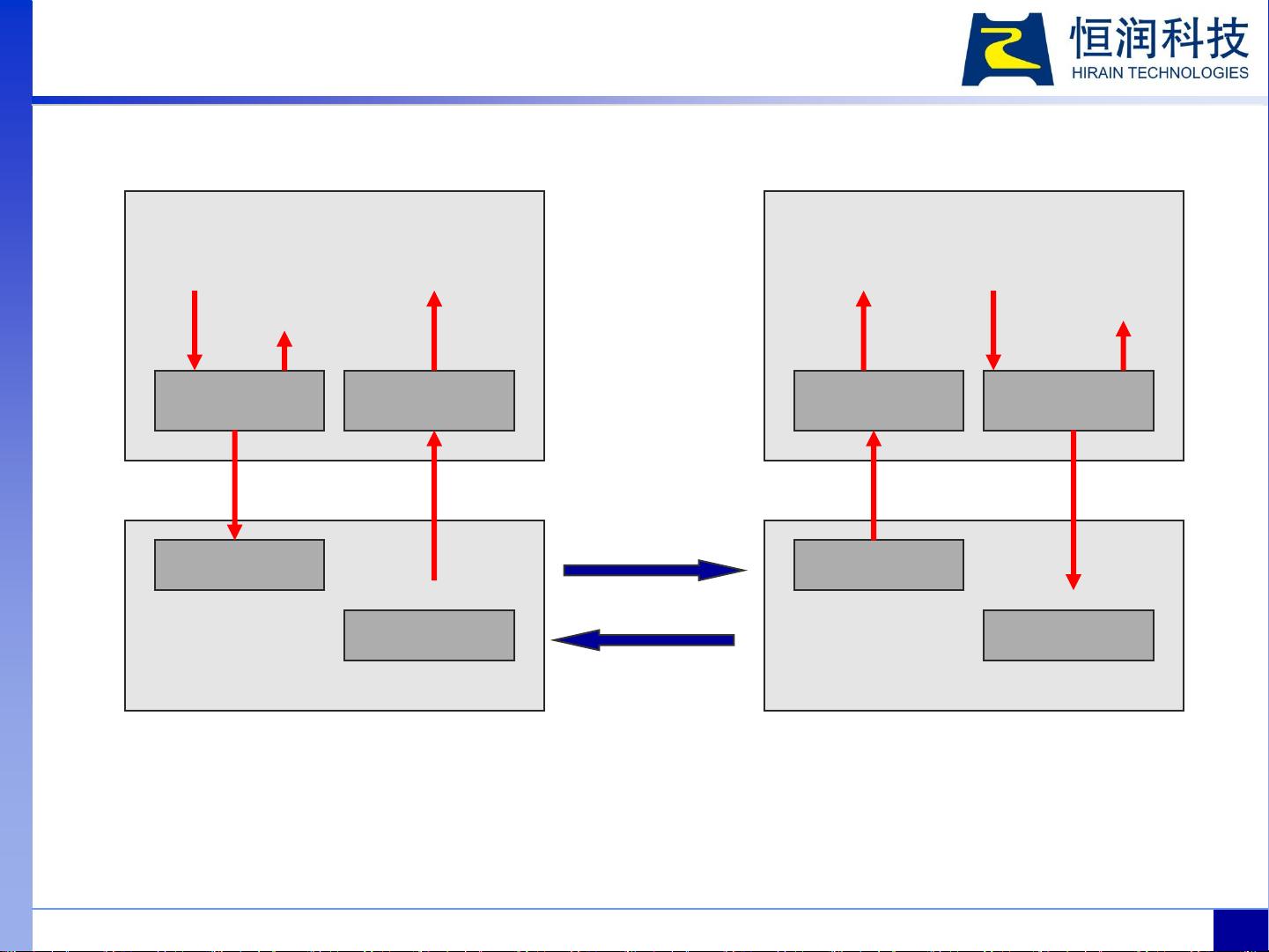
概述
OSI
各层 汽车制造商的增强诊断 法规要求的排放相关诊断(
OBD
)
诊断应用 用户定义
ISO 15031-5
应用层
ISO 15765-3/ ISO 14229-1 ISO 15031-5
表示层 无 无
会话层
ISO 15765-3 ISO 15765-4
传输层 无 无
网络层
ISO 15765-2 ISO 15765-4
数据链路层
ISO 11898-1 ISO 15765-4
物理层 用户定义
ISO 15765-4
增强的诊断和法规要求的OBD诊断规范对OSI各层的映射