第1章 机器人基础知识
工业机器人常用术语
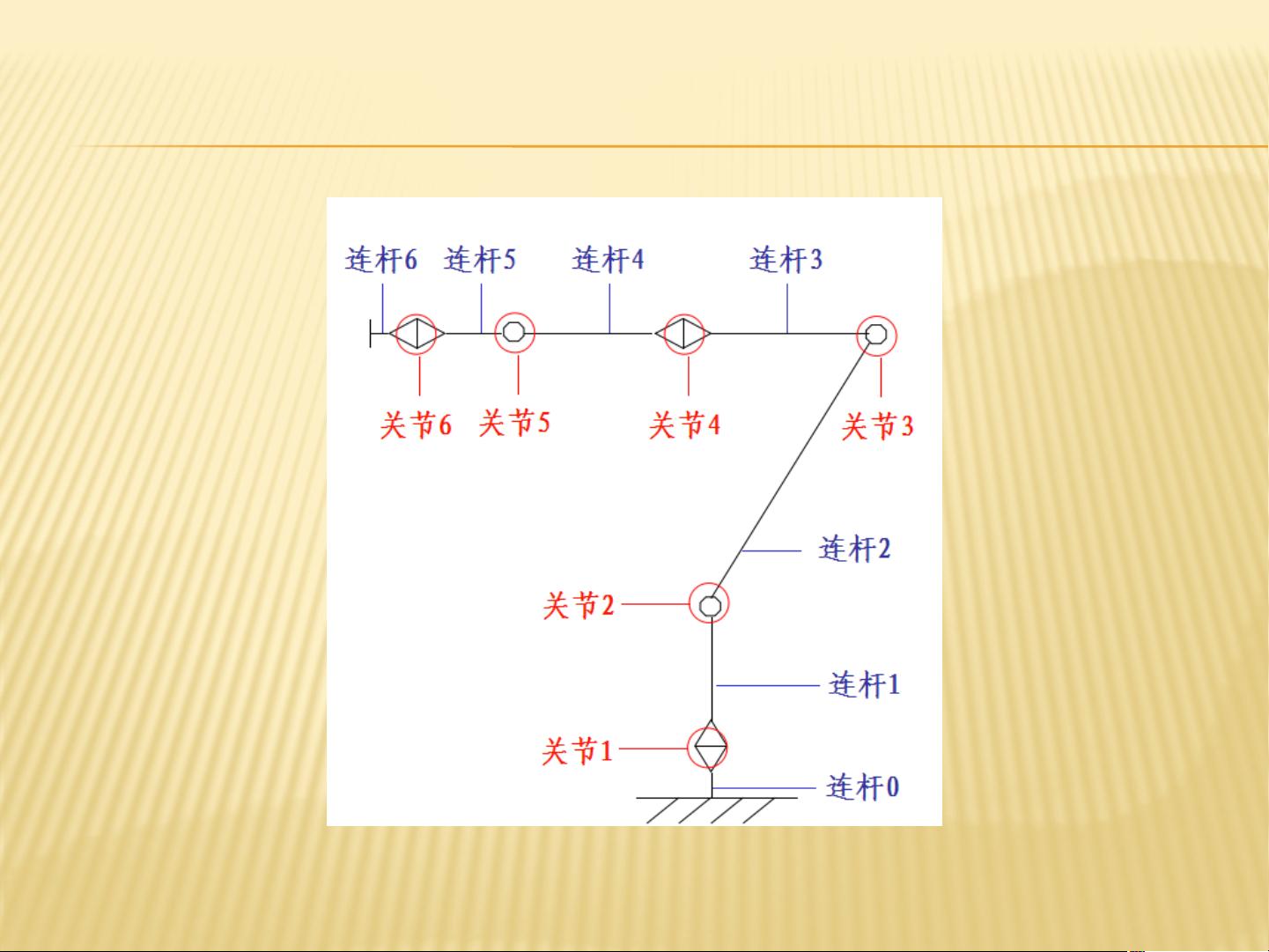
1.自由度(degree of freedom, DOF ):物体能够对坐标系进行独立运动的数目称为自由
度,对于自由刚体,具有6个自由度。通常作为机器人的技术指标,反映机器人灵活性
,对于焊接机器人一般具有5-6个自由度 。
2.位姿(Pose):指工具的位置和姿态。
3.末端操作器(End Effector):位于机器人腕部末端,直接执行工作要求的装置,如:夹
持器、焊枪、焊钳等。
4.载荷(Payload):指机器人手腕部最大负重,通常情况下弧焊机器人为5~20kg;点焊
机器人为50~200kg。
5.工作空间(Working Space):机器人工作时,其腕轴交点能在空间活动的范围。
6.重复位姿精度(Pose Repeatability):在同一条件下,重复N次所测得的位姿一致的程
度。
7.轨迹重复精度(Path Repeatability):沿同一轨迹跟随N次,所测得的轨迹之间的一致
程度。
8.示教再现(playback robot):通过操作示教器移动机器人焊枪,按照工作顺序确定焊
枪姿态并存储焊丝端部轨迹点,通过调用各种命令并设定参数,生成一个机器人焊接
作业程序。“作业程序”(或称任务程序)为一组运动及辅助功能命令,通过自动运
行,机器人可以重复地顺序执行一系列的焊接作业程序。