CAN协议教程.pdf
需积分: 10 34 浏览量
2020-10-29
14:10:52
上传
评论
收藏 634KB PDF 举报

CAN 协议教程
本 CAN 协议教程概述了 ISO 11898-1 和 ISO 11898-2 标准。对 CAN 的基本原理做出了详细的介
绍,诸如用于汽车设计、工业自动化控制以及更多的应用。
一,介绍: CAN总线
CAN总线是广播类型的总线。这意味着所有节点都可以侦听到所有传输的报文。没有办法
把报文单独发送给特定的节点;所有节点都将原封不动地捕获所有报文。但是, CAN硬件能够提
供本地过滤能力,从而每个节点可以只对感兴趣的报文做出响应。
总线使用不归零的位填充。模块以连续逻辑与方式连接到总线:如果只有一个节点向总线
传输逻辑 0,那么不管有多少个节点向总线传输逻辑 1,整个总线都处于逻辑 0 状态。
CAN标准定义四种不同的报文类型。报文使用一种聪明的位操作仲裁方案来控制对总线的
访问,每条报文都带有优先级标记。
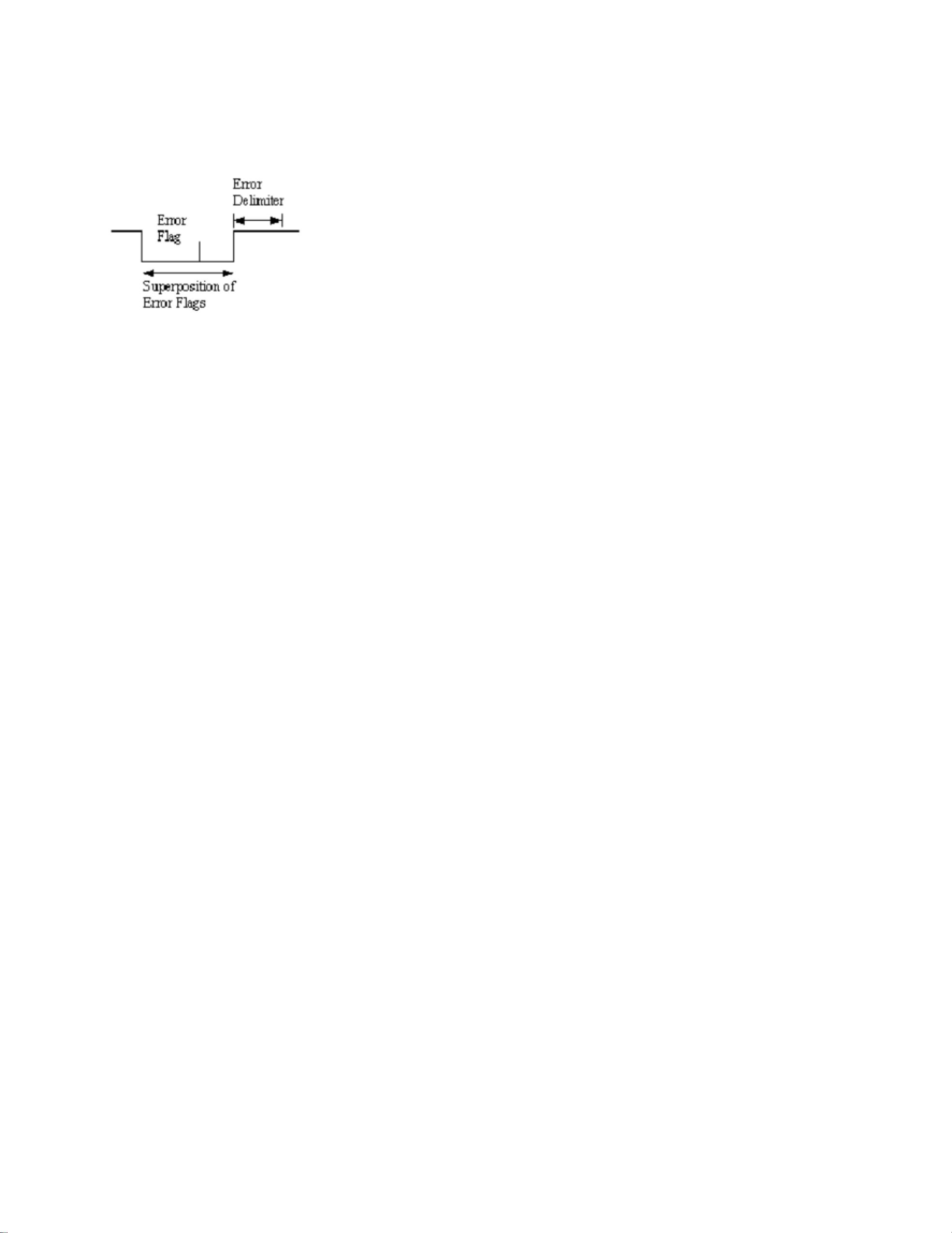
CAN标准还为错误处理和消除定义了详细的方案。这在第 9 节“ CAN错误处理”(第 23
页)中有更详细的说明。
在本教程第 8 页讨论位计时和时钟同步。这里有一个位计时计算器,您可以用它来计算
CAN总线参数和寄存器设置。
CAN可以使用不同的物理层来实现(第 5 页),这里阐述其中一些。而且,可以使用许多
不同种类的连接器。我们还为对报文细节感兴趣的用户提供了许多示波器图片(第 6 页)。
二, CAN报文
CAN总线是广播类型的总线。这意味着所有节点都可以侦听到所有传输的报文。没有办法
把报文单独发送给特定的节点;所有节点都将原封不动地捕获所有报文。但是, CAN硬件能够提
供本地过滤能力,从而每个节点可以只对感兴趣的报文做出响应。
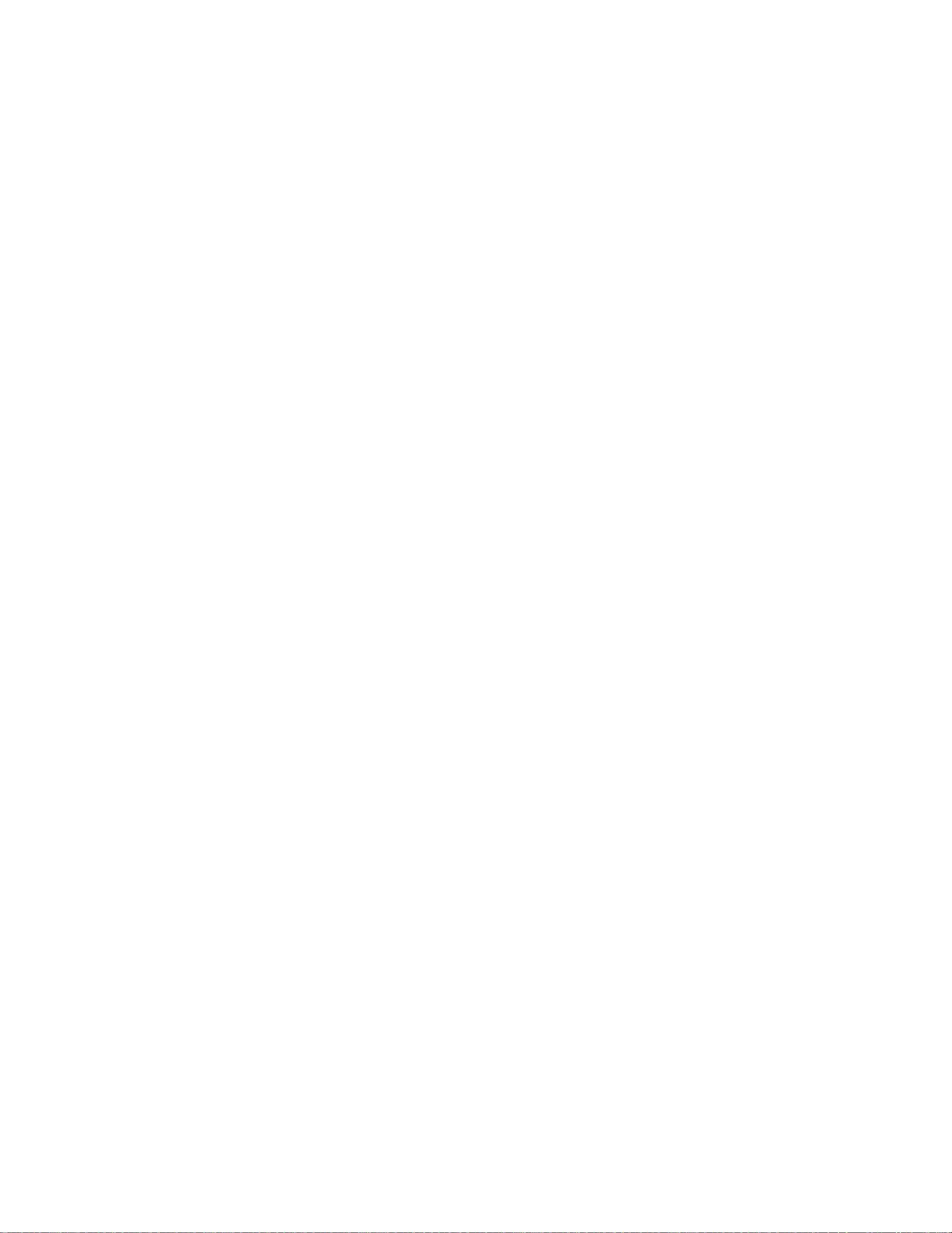
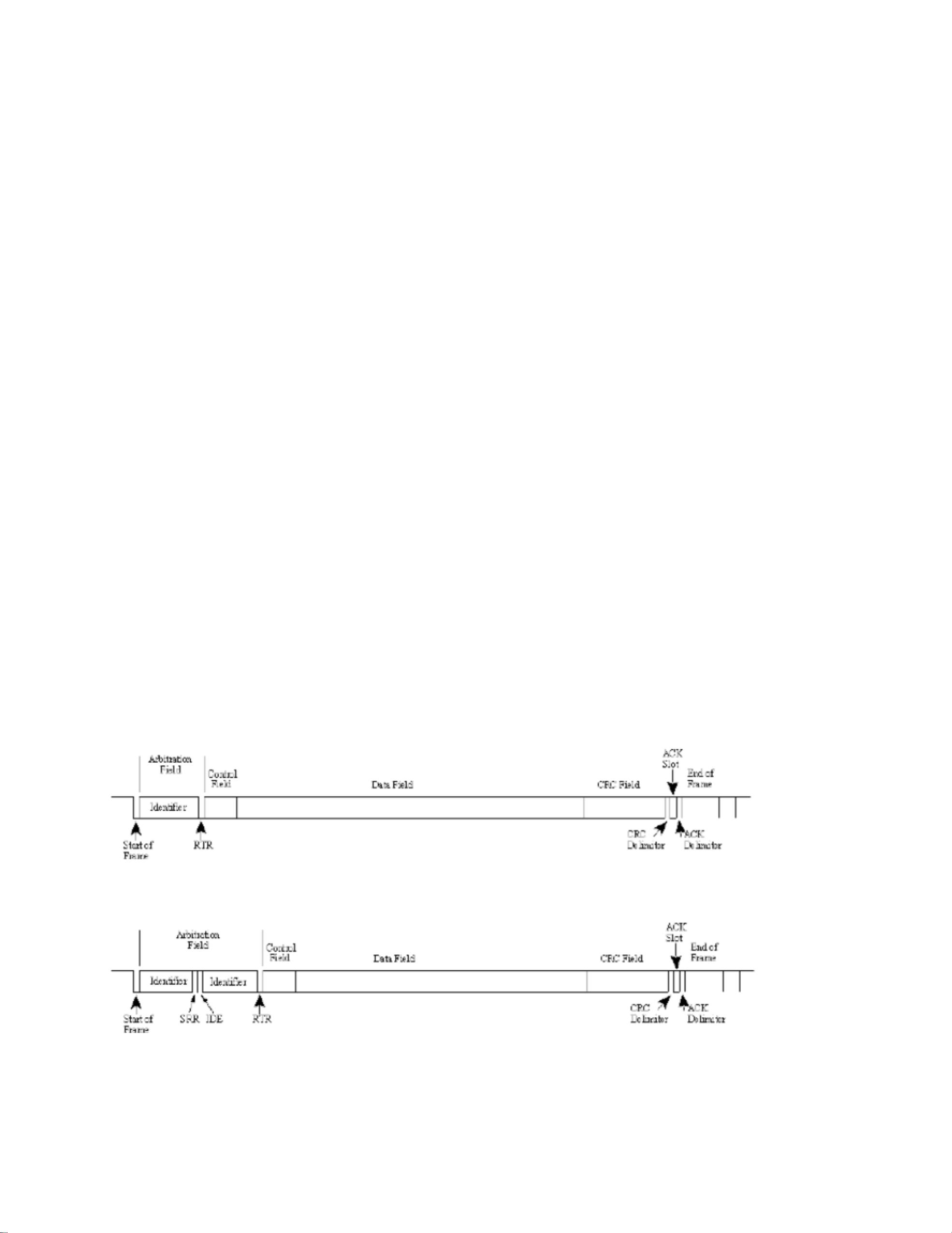
CAN报文
CAN使用短报文 –最大实用负载是 94 位。报文中没有任何明确的地址;相反,可以认为报
文是通过内容寻址,也就是说,报文的内容默示地确定其地址。
报文类型
CAN总线上有四种不同的报文类型(或 “帧”):


剩余22页未读,继续阅读
资源评论


霸道流氓气质
- 粉丝: 1w+
- 资源: 589











