
倒立摆系统的控制器设计
1
1. 建立倒立摆系统数学模型
1.1 倒立摆系统简介
支点在下,重心在上,恒不稳定的系统或装置的叫倒立摆。相反,支点在上而重心在下
的则称为顺摆。在日常生活中,摆以不同的形式存在着。
倒立摆的种类:悬挂式、直线、环形、平面倒立摆等。一级、二级、三级、四级乃至多
级倒立摆。由倒立摆和其它元件组成的元件称为倒立摆系统。
倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各
种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中的许多典型问题:如
非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。通过对倒立摆的控制,用
来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
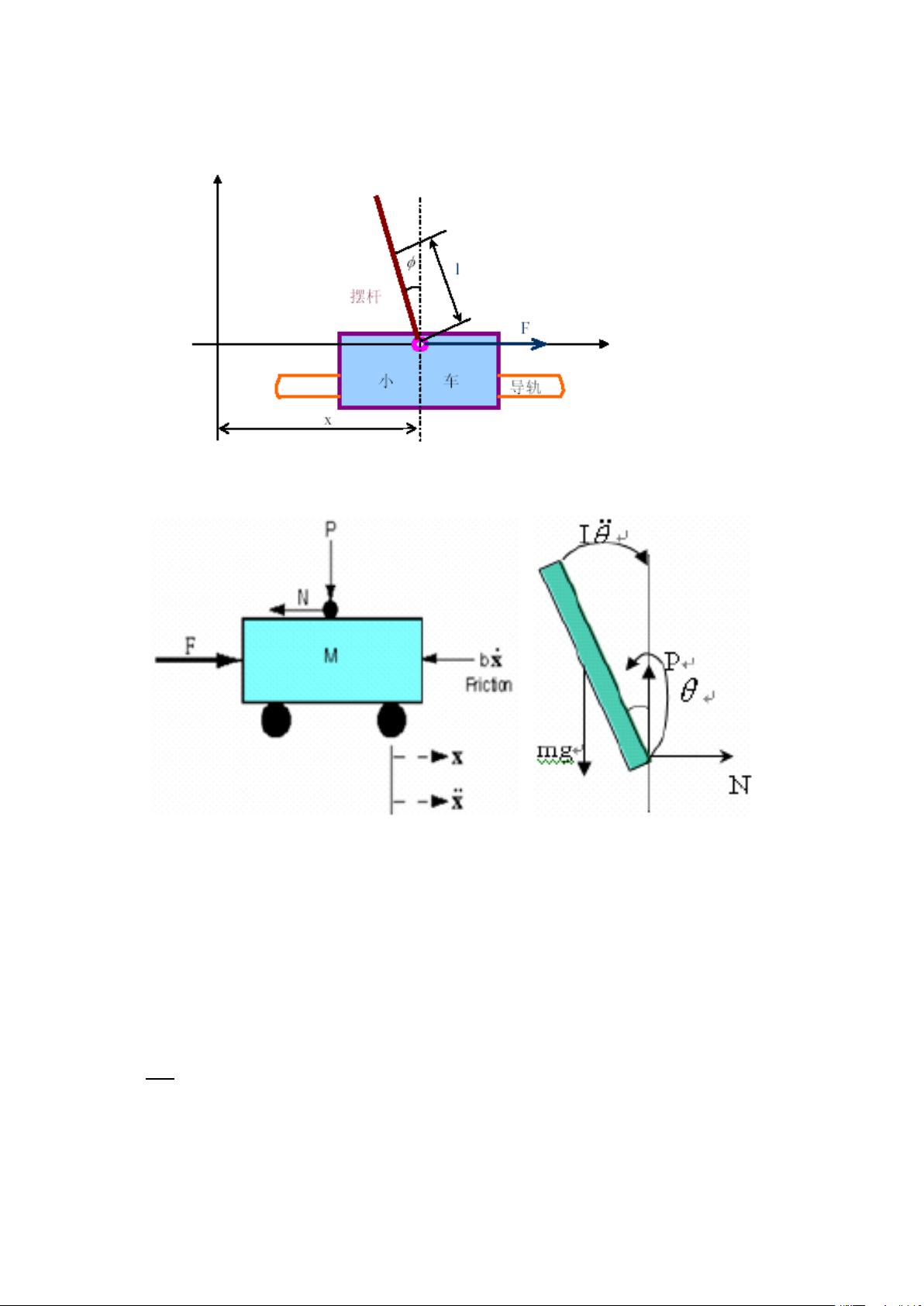
倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大
的角度和速度。当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。此为倒
立摆控制器的设计目标。倒立摆系统的输入为小车的位移(即位置)和摆杆的倾斜角度期望
值,计算机在每一个采样周期中采集来自传感器的小车与摆杆的实际位置信号,与期望值进
行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。
直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小车上,能以此点为轴
心使摆杆能在垂直的平面上自由地摆动。作用力 u 平行于铁轨的方向作用于小车,使杆绕小
车上的轴在竖直平面内旋转,小车沿着水平铁轨运动。当没有作用力时,摆杆处于垂直的稳
定的平衡位置(竖直向下)。为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制
力,使其在轨道上被往前或朝后拉动。
1.2 建立倒立摆系统数学模型。
系统建模可以分为两种:机理建模和实验建模。对于倒立摆系统,由于其本身是自不稳
定的系统,实验建模存在一定的困难。故控制器的设计采用机理建模。
机理建模——机理建模就是在了解研究对象的运动规律基础上,通过物理、化学等学科
的知识和数学手段建立起系统内部变量、输入变量以及输出变量之间的数学关系。
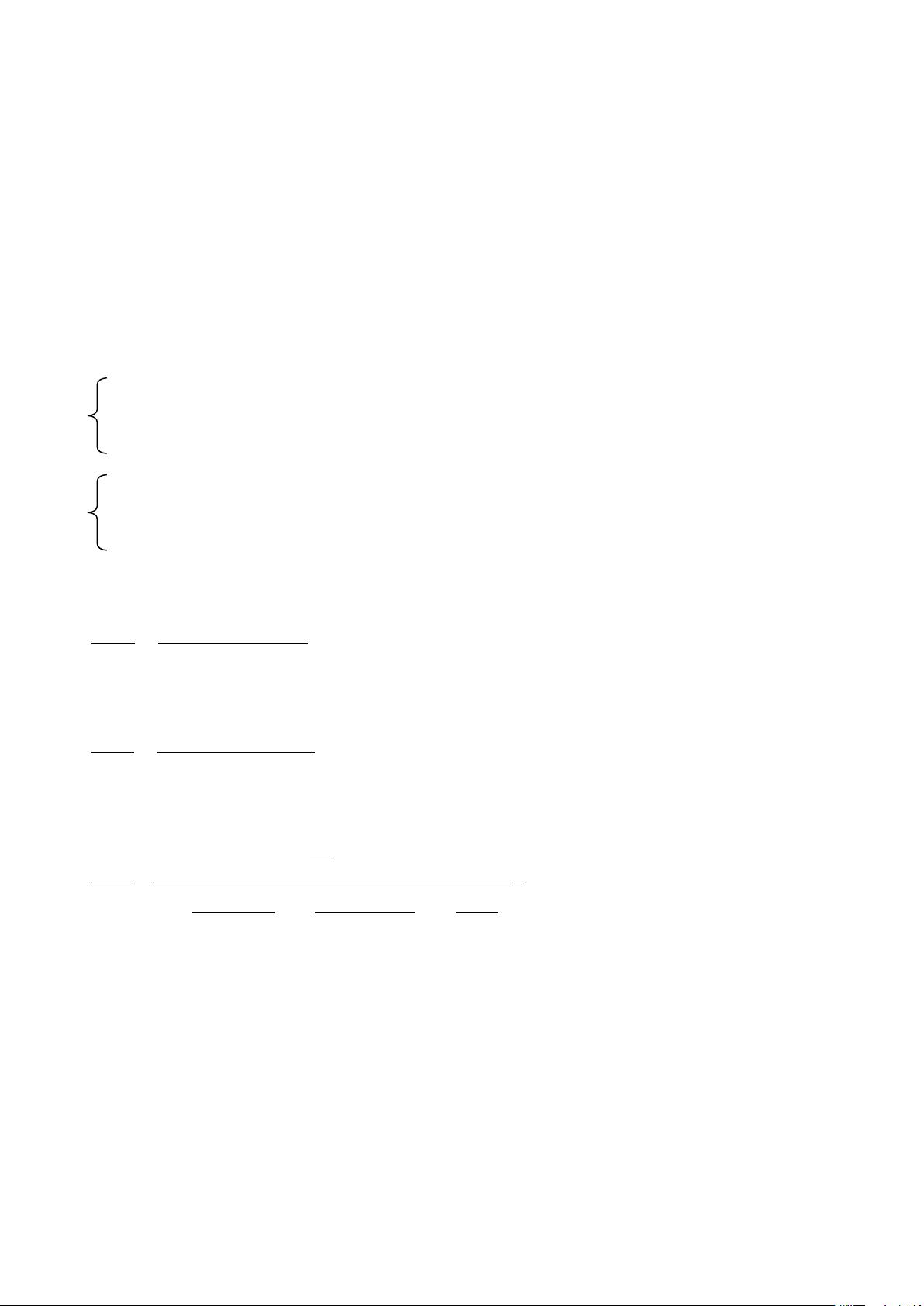
1.2.1 摆杆和小车系统受力分析
对摆杆和小车单独进行受力分析,并且对摆杆、小车、导轨组成的系统整体进行受力分
析。















- 1
- 2
前往页