STM32 ROS小车设计,附PID、运动模型解算、ros串口命令等详细教程
58 浏览量
2021-01-06
09:55:17
上传
评论 23
收藏 1.07MB PDF 举报

STM32 ROS小车设计,附小车设计,附PID、运动模型解算、、运动模型解算、ros串口命令等详串口命令等详
细教程细教程
主要目的主要目的
本人平时研究slam算法,比如激光导航,动态路径规划,以及其它上层业务以及外围驱动相关的开发。其中会很多的理论和实际应其中会很多的理论和实际应
用会用到用会用到ros系统中的一些开源的软件包,所以希望借助于系统中的一些开源的软件包,所以希望借助于ros平台能够快速的验证和实现一些实际应用需要的解决方法平台能够快速的验证和实现一些实际应用需要的解决方法。苦于资金紧
张,等了好久才下决心做一个ros小车用于学习和研究。下面我会详细介绍我从头开始一步一步小车底层的计划、思路等。
ros小车方案选型小车方案选型
要从头做一个小车底盘,首先要了解小车底盘结构、硬件、模块等等。小车底盘承载着机器人定位、导航、移动、避障等多种功能,是
机器人必不可少的重要硬件。所以一个好的底盘对于上层算法定位、导航、控制精度至关重要!底盘主要包括如下:
1. 小车驱动模型
2. 小车负载要求(电池容量)
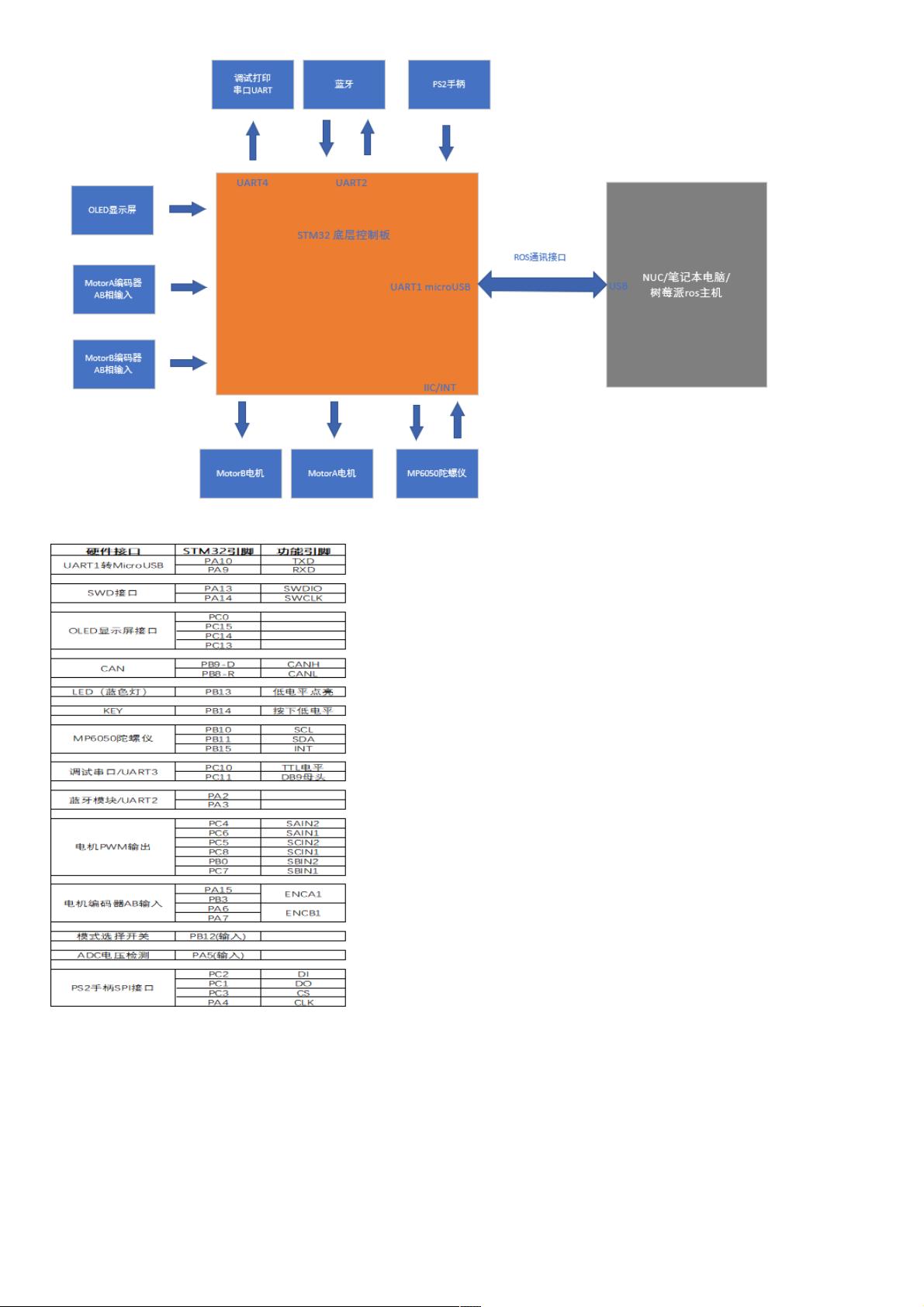
3. 底层驱动控制板
4. 电机编码器选型
5. 传感器配套等等
有了上面基本需求后,接下来是自己从头设计还是借助现成的平台,就看各位自身时间安排和目的了。像我这种几乎天天加班,没有太
多业余时间,另外主要目的还是借助于这个平台学习和研究ros系统相关的知识,同时又想把底层控制相关的从头做一遍。思考再三,决
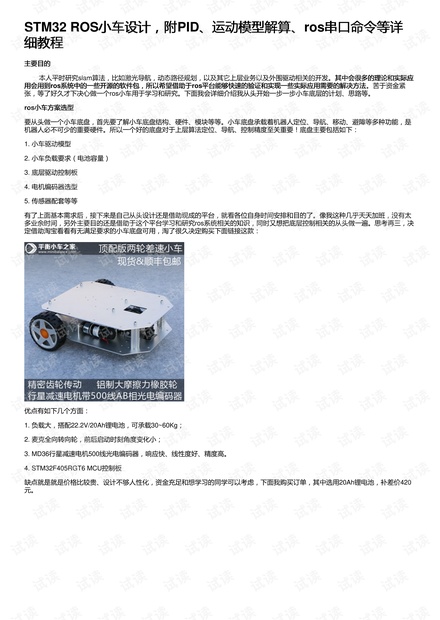
定借助淘宝看看有无满足要求的小车底盘可用,淘了很久决定购买下面链接这款:
优点有如下几个方面:
1. 负载大,搭配22.2V/20Ah锂电池,可承载30~60Kg;
2. 麦克全向转向轮,前后启动时刻角度变化小;
3. MD36行星减速电机500线光电编码器,响应快、线性度好、精度高。
4. STM32F405RGT6 MCU控制板
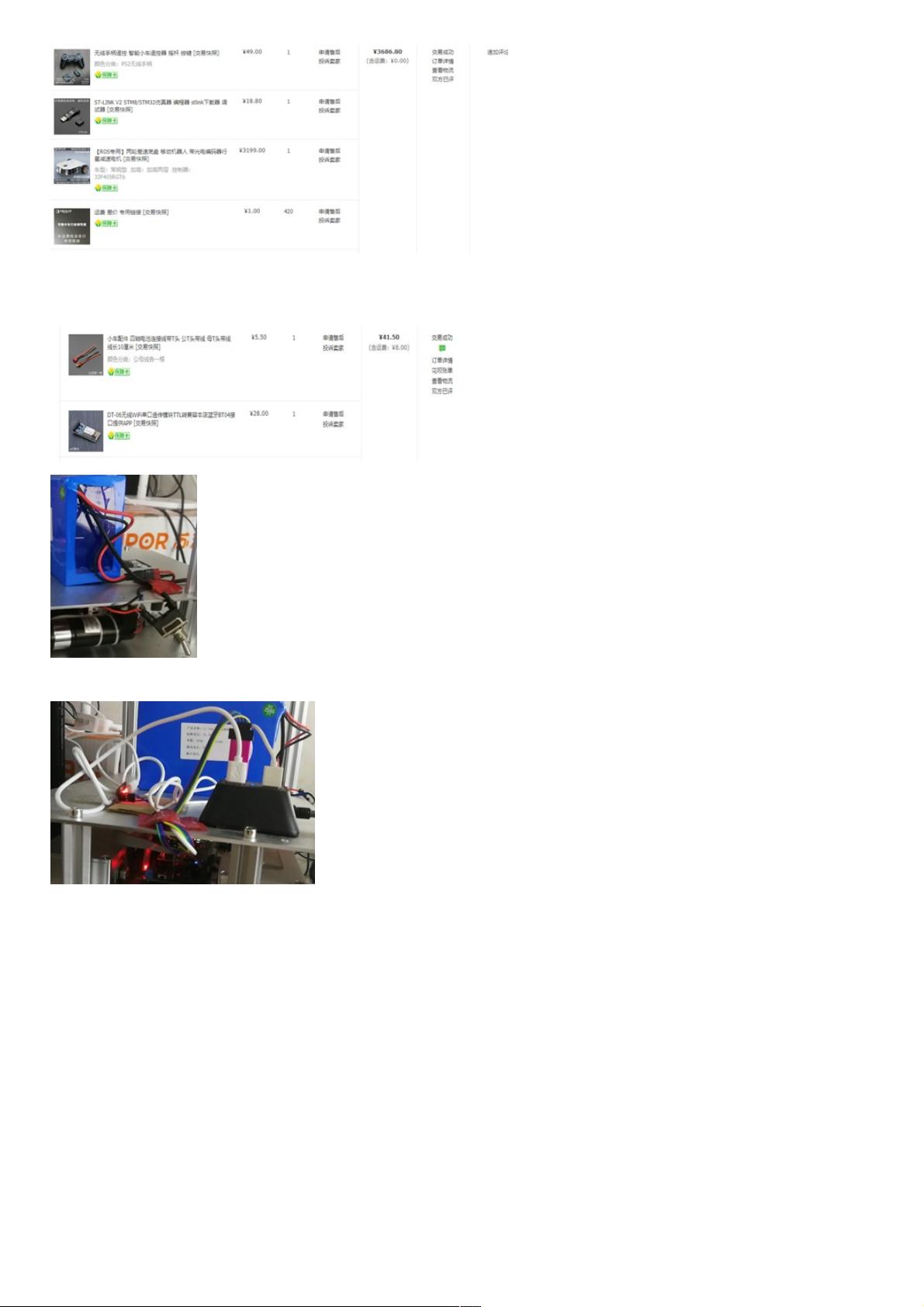
缺点就是就是价格比较贵、设计不够人性化,资金充足和想学习的同学可以考虑,下面我购买订单,其中选用20Ah锂电池,补差价420
元。
剩余11页未读,继续阅读
资源评论













