合成孔径激光雷达原理
需积分: 50 107 浏览量
2015-11-07
15:46:13
上传
评论 1
收藏 71KB DOC 举报

合成孔径激光雷达工作原理
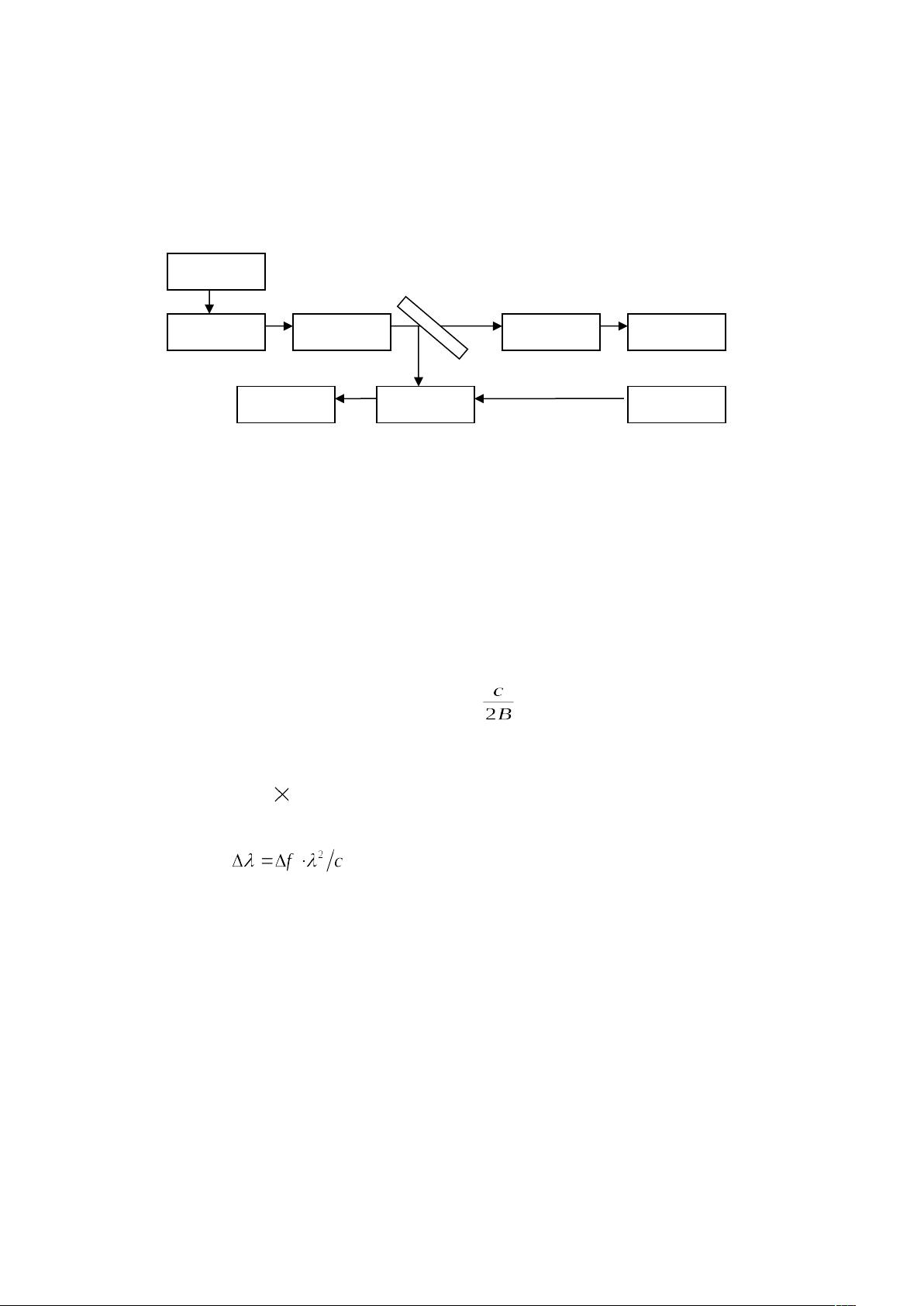
一. 激光雷达系统框图
激光雷达系统可以分为三个子系统:发射系统,接收系统,信号处理系统。下面分别
对这三部分中的主要技术作简要介绍。
二. 发射系统
发射系统主要由激光电源、激光器、激光调制器、分数器、光速控制器、扫描装置、
发射天线组成。
1. 激光电源
激光调制器是通过控制激光电源达到调制激光器输出波形和参数的。
2. 激光器
激光器是激光雷达发射系统的关键部件。雷达的距离分辨率由信号带宽 B 决定:
ρ=
对于合成孔径激光雷达,若要距离分辨率ρ=1mm, 根据上式,需要线性调频信号的
带宽B=1.5 1011Hz, 对应于1.55μm的中心波长而言,理论计算得到的波长调谐范
围为 =1.2nm。而实际线性调频信号波长范围的选择需要考虑以下
因素对波长冗余量取值的影响:(1)考虑到激光器每次输出的线性调频信号的起
始波长不相同,需要利用HCN分子波长参考器来进行波长定标。文献表明进行波长
定标后的有效波长范围约为整个线性调频信号波长范围的三分之二,而通过分析
HCN分子波长参考器的光谱特点,可以发现有效波长范围的具体取值还与定标时波
长精度要求和波长起始点的选择有关。(2)在信号处理时,为了保证图像质量需
进行旁瓣抑制,而旁瓣抑制又会造成分辨率下降,文献表明为了避免旁瓣抑制造成
的分辨率下降需要线性调频信号的带宽有5~7倍的冗余,当然线性调频信号的调谐
范围和分辨率的准确关系只有等后续模拟仿真后才能得到。
激光电源
激光器 光速控制 发射天线
激光调制
信号处理 探测器 接收天线
资源评论













