





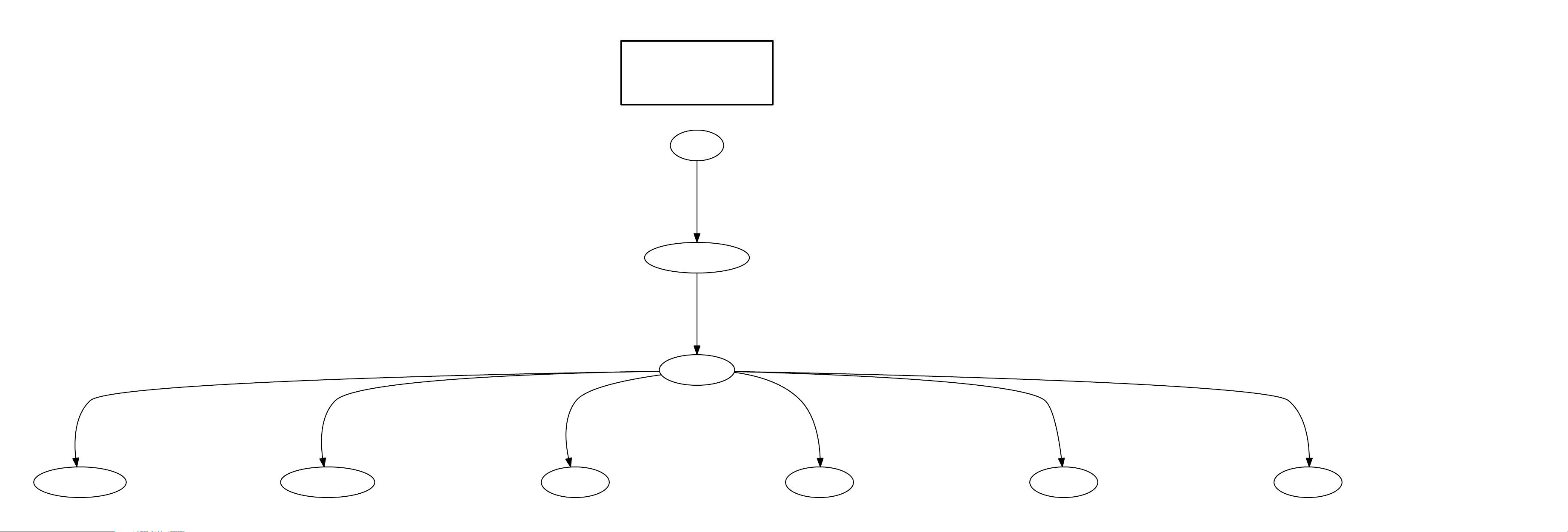
view_frames Result
odom
base_footprint
Broadcaster: /gazebo
Average rate: 100.243 Hz
Most recent transform: 325.136 ( 0.004 sec old)
Buffer length: 4.120 sec
base_link
Broadcaster: /robot_state_publisher
Average rate: 50.256 Hz
Most recent transform: 325.627 ( -0.487 sec old)
Buffer length: 4.099 sec
camera_link
Broadcaster: /robot_state_publisher
Average rate: 50.256 Hz
Most recent transform: 325.627 ( -0.487 sec old)
Buffer length: 4.099 sec
hokuyo_link
Broadcaster: /robot_state_publisher
Average rate: 50.256 Hz
Most recent transform: 325.627 ( -0.487 sec old)
Buffer length: 4.099 sec
wheel_1
Broadcaster: /robot_state_publisher
Average rate: 10.246 Hz
Most recent transform: 325.138 ( 0.002 sec old)
Buffer length: 4.099 sec
wheel_2
Broadcaster: /robot_state_publisher
Average rate: 10.246 Hz
Most recent transform: 325.138 ( 0.002 sec old)
Buffer length: 4.099 sec
wheel_3
Broadcaster: /robot_state_publisher
Average rate: 10.246 Hz
Most recent transform: 325.138 ( 0.002 sec old)
Buffer length: 4.099 sec
wheel_4
Broadcaster: /robot_state_publisher
Average rate: 10.246 Hz
Most recent transform: 325.138 ( 0.002 sec old)
Buffer length: 4.099 sec
Recorded at time: 325.140













评论22