PID算法实例分析及程序
需积分: 31 9 浏览量
2010-08-26
10:29:15
上传
评论 1
收藏 110KB DOC 举报

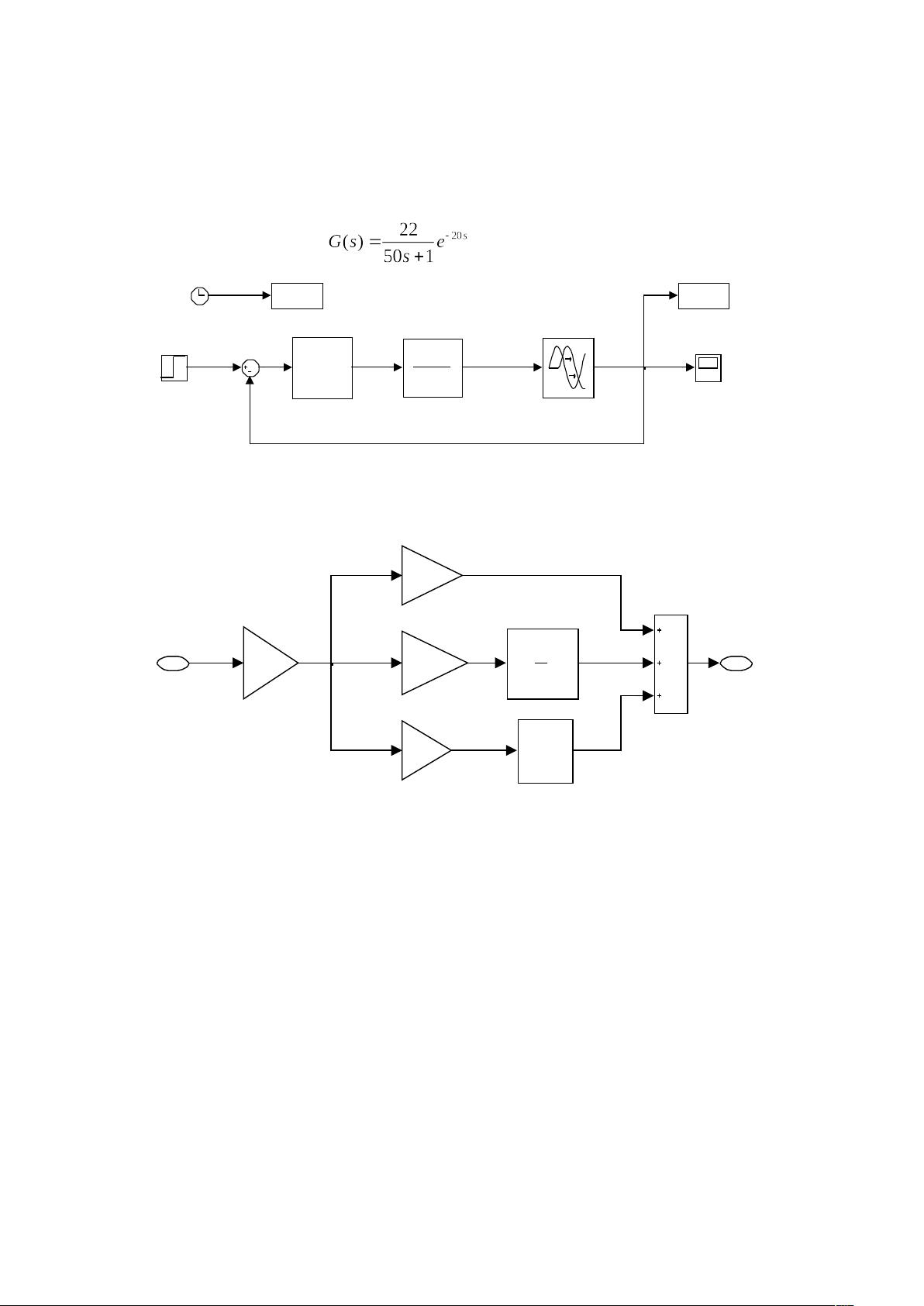
PID 的调节实例
例1. 已知传递函数 ,其 控制模型如下:
In1 Out1
pid
Transport
Delay
22
50s+1
Transfer Fcn1
t
To Workspace1
y
To Workspace
Step
Scope
Clock
其中 模块如下:
1
Out1
1
s
Integrator
1
Gain4
TD
Gain3
1/TI
Gain2
KP
Gain1
du/dt
Derivative
Add
1
In1
请用整定 调节器的参数,使系统的超调量小于 ,并求其动
态性能指标。
解:第一种方法
()建系统模型及 模型;
()封装 模块,并设置参数;
()利用 整定公式整定 调节器的初始参数;
表 1. 调节器 Ziegler-Nichols 整定公式
1
资源评论













