(一)
补偿完结分析
来自自控原理书
1. D
“需要指出,因为微分控制作用只对动态过程其作用,而对稳态过程没有影
响,且对系统噪声非常敏感,所以单一的
D
控制器在任何情况下都不适宜与被控对象串连
起来单独使用。”
2. I
“积分控制器
I
,可以提高系统的稳态性能,但是积分控制使系统增加一个位于
原点的开环极点,是信号滞后
90
度,对稳定性不利。”
3. P
“比例控制,具有比例控制规律的控制器,称为
P
控制器,加大控制器增益
Kp,
可以提高系统的开环增益,减小系统的稳态误差,从而提高系统的控制精度,但是会降低系
统的相对稳定性,甚至可能造成系统的不稳定。”
1
)这个传递函数中最直观的的反映只有零极点,是针对频域讨论
2
)
PID
控制是时域分析手法,所以你要得到
PID
的系数就需要分别了解构成
P
,
I
,
D
环节是
由那几个的元件主导的,时域的分析方法是困难的,所以一般只作为理论依据,分析还是根
据频域的零极点模型。
3
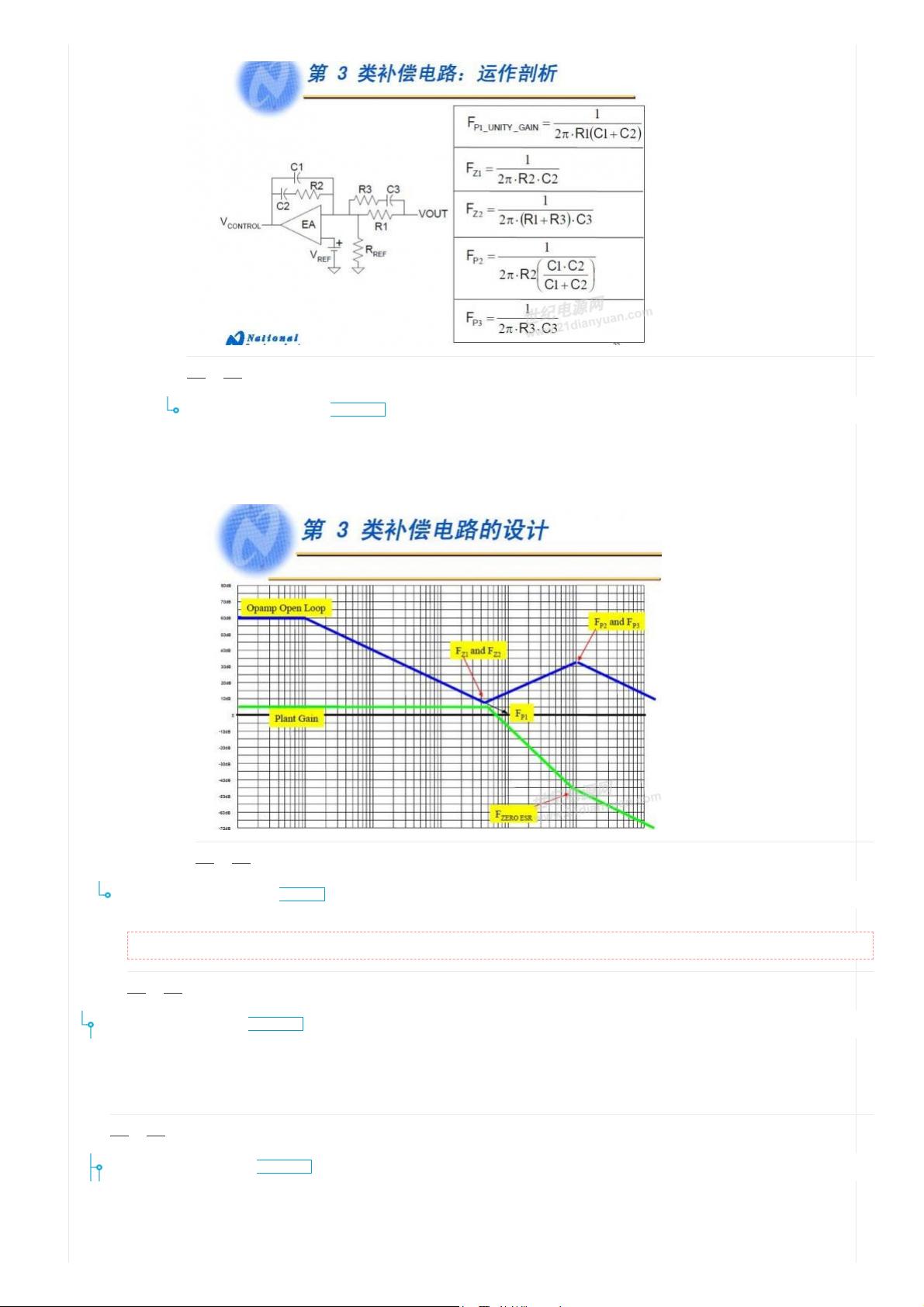
)如果你能把传递函数转变成下来第二式的形式便能得到
P
,
I
,
D
的系数,但是显然有些
困难。