Robotics__Vision_and_Control_Fundamental_Algorithms_in_MATLAB英文版...
需积分: 9 127 浏览量
2017-12-23
21:47:38
上传
评论
收藏 5.4MB PDF 举报

4
Chapter
Mobile Robot Vehicles
helpful to consider some general, but important, concepts regarding mobility.
4.1
l
Mobility
We have already touched on the diversity of mobile robots and their modes of locomo-
tion. In this section we will discuss mobility which is concerned with how a vehicle
moves in space.
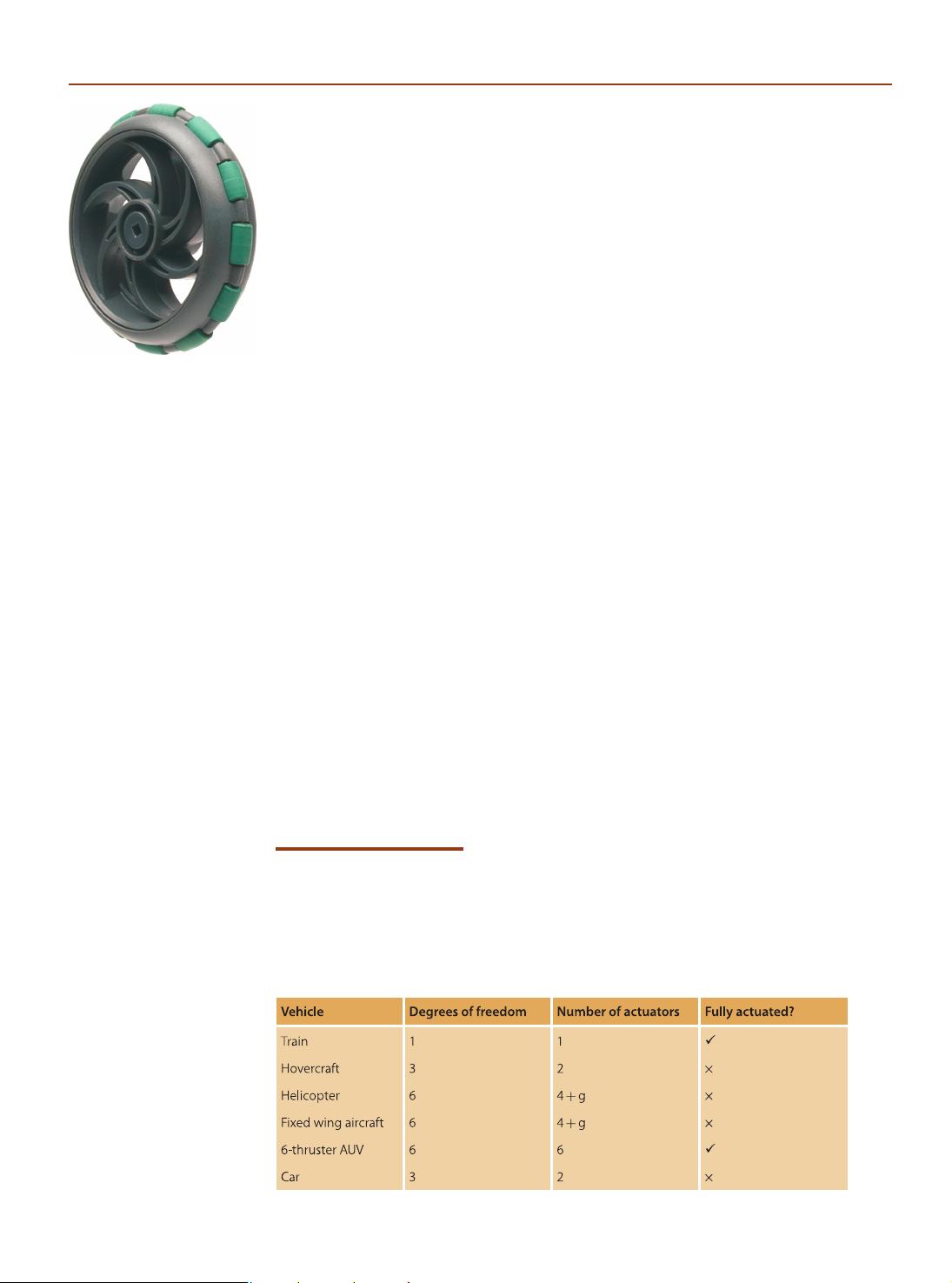
We first consider the simple example of a train. The train moves along rails and its posi-
tion is described by its distance along the rail from some datum. The configuration of the
train can be completely described by a scalar parameter q which is called its generalized
coordinate. The set of all possible configurations is the configuration space, or C-space, de-
noted by C and q∈C. In this case C ⊂R. We also say that the train has one degree of free-
dom since q is a scalar. The train also has one actuator (motor) that propels it forwards or
backwards along the rail. With one motor and one degree of freedom the train is fully
actuated and can achieve any desired configuration, that is, any position along the rail.
Another important concept is task space which is the set of all possible poses ξ of
the vehicle and ξ ∈ T. The task space depends on the application or task. If our task
was motion along the rail then T ⊂ R. If we cared only about the position of the train
in a plane then T ⊂ R
2
. If we considered a 3-dimensional world then T ⊂ SE(3), and its
height changes as it moves up and down hills and its orientation changes as it moves
around curves. Clearly for these last two cases the dimensions of the task space exceed
the dimensions of the configuration space and the train cannot attain an arbitrary
pose since it is constrained to move along fixed rails. In these cases we say that the
train moves along a manifold in the task space and there is a mapping from q ξ.
Interestingly many vehicles share certain characteristics with trains – they are good
at moving forward but not so good at moving sideways. Cars, hovercrafts, ships and
aircraft all exhibit this characteristic and require complex manoeuvring in order to
move sideways. Nevertheless this is a very sensible design approach since it caters to
the motion we most commonly require of the vehicle. The less common motions such
as parking a car, docking a ship or landing an aircraft are more complex, but not im-
possible, and humans can learn this skill. The benefit of this type of design comes
from simplification and in particular reducing the number of actuators required.
This chapter discusses how a robot platform moves, that is, how its pose
changes with time as a function of its control inputs. There are many differ-
ent types of robot platform as shown on pages 61–63 but in this chapter we
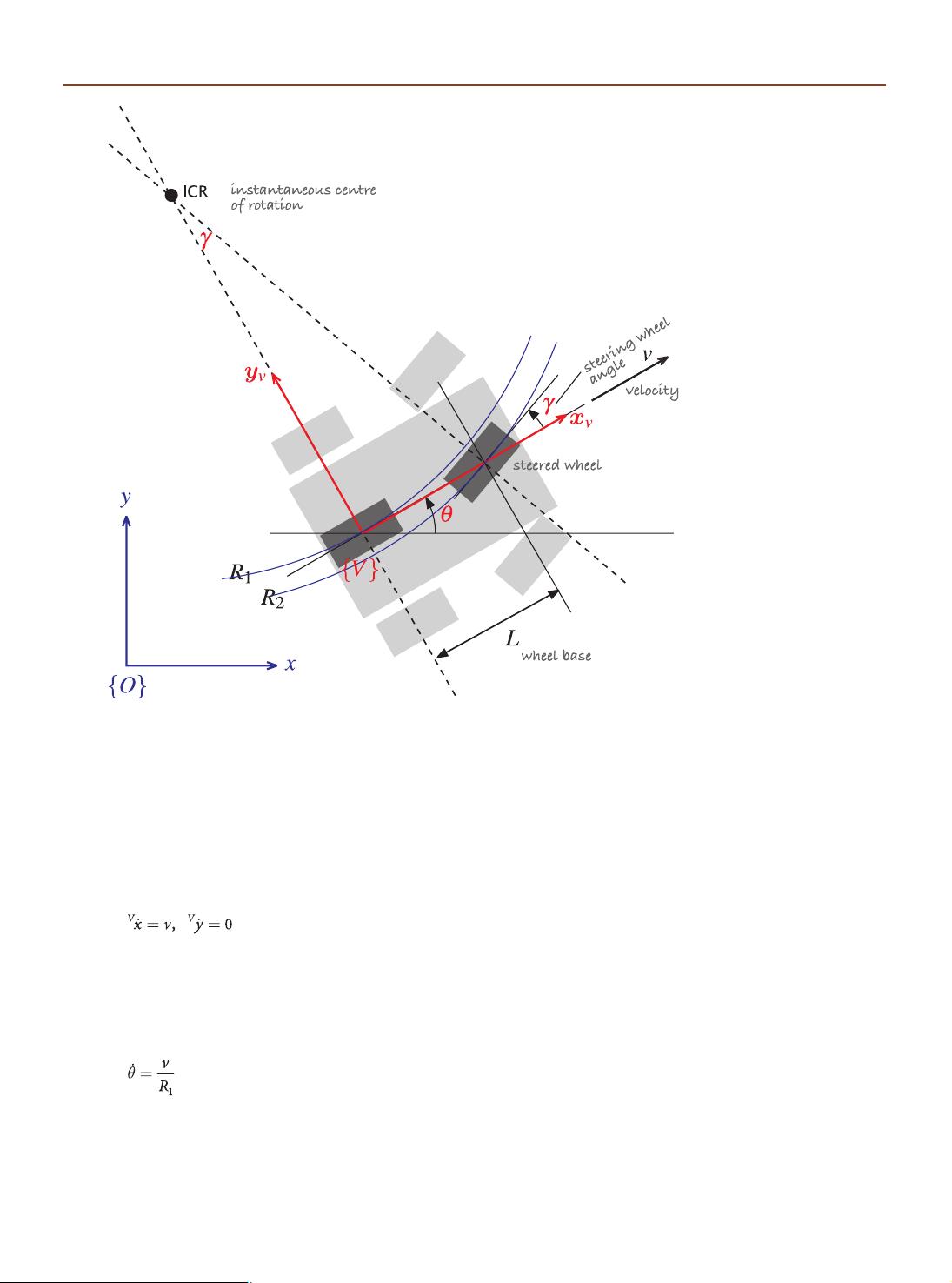
will consider only two which are important exemplars. The first is a wheeled
vehicle like a car which operates in a 2-dimensional world. It can be pro-
pelled forwards or backwards and its heading direction controlled by chang-
ing the angle of its steered wheels. The second platform is a quadcopter, a
flying vehicle, which is an example of a robot that moves in 3-dimensional
space. Quadcopters are becoming increasing popular as a robot platform
since they can be quite easily modelled and controlled.
However before we start to discuss these two robot platforms it will be


剩余21页未读,继续阅读
资源评论


qq_14903801
- 粉丝: 5
- 资源: 25











