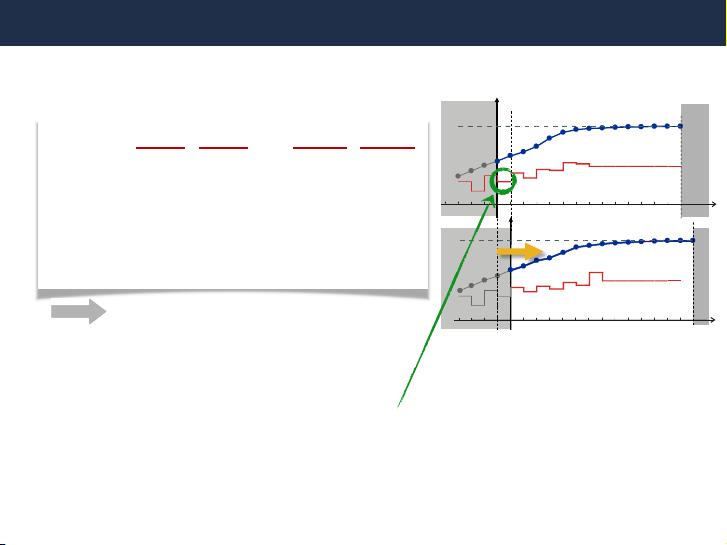
t+1
t+1+k
t+N+1
future
predicted outputs
manipulated inputs
t
t+k
t+N
u
k
r(t)
y
k
past
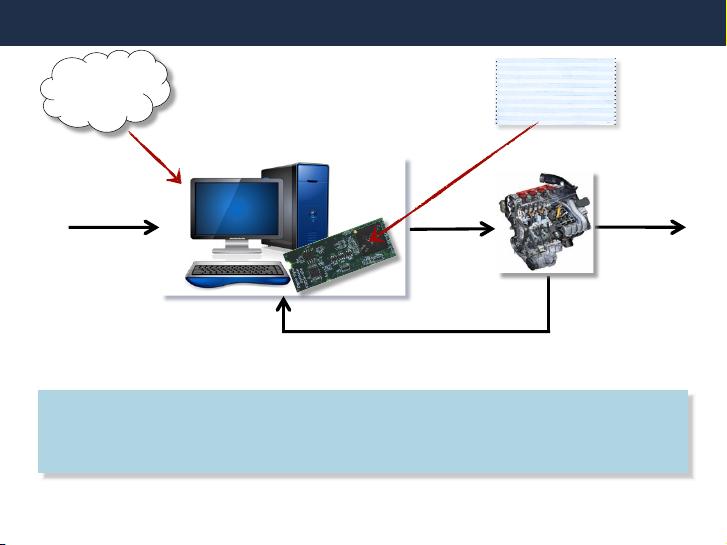
Model Predictive Control (MPC)
• At time t: find the best control sequence over a future horizon of N steps
min
N−1
∑
k=0
penalty on tracking error
z }| {
∥W
y
(y
k
− r(t))∥
2
2
+
penalty on actuators
z }| {
∥W
u
(u
k
− u
r
(t))∥
2
2
s.t. x
k+1
= f(x
k
, u
k
, t)
y
k
= g(x
k
, u
k
, t)
constraints on u
k
, y
k
x
0
= x(t) ⇐ feedback !
optimization problem
• Solve the resulting optimization problem with respect to {u
0
, . . . , u
N−1
}
• Apply only the first optimal move
u
(
t
) =
u
∗
0
and discard the remaining
samples
• At time t + 1: Get new measurements, repeat the optimization. And so on …
©2018 A. Bemporad - ``Model Predictive Control'' 4/122