文章编号 :1674 - 7046(2011)03 -0047 -4
基 于 单 片 机 的 智 能 小 车 控 制 系 统 设 计
葛广军
1
,杨 帆
2
(1 .河南城建学院电气系 ,河南 平顶山 467036 ;2 .河南工业大学电气工程学院 ,河南 郑州 450001)
摘 要 : 舷设计了一种 能够自动 循迹的 智能小车 。 智能小车的 控制系 统以单片 机
MC912DG128 为核心 ,由路径识别 、车速检测 、舵机控制 、直流电机 、电机驱动芯
片 LMD18200 和电压转换芯片 LM7525 等模块组成 ,并详细阐述了控制系统的
组成原理和软硬件设计 。 实验结果表明 :该控制系统具有循迹效果好 、性能稳
定等优点 。
关键词 : 智能小车 ;单片机 ;路径识别 ;控制系统
中图分类号 : TP242 .6 文献标识码 :A
智能小车是轮式移动机器人研究领域的一项
重要内容 ,涵盖了机械 、汽车电子 、电气 、计算机 、检
测技术 、模式识别与智能控制等多个学科 。 它是陆
地自主行驶车辆(Autonomous Ground Vehicle ,AGV)
的一种 。 AGV 在社会生活的各个领域都有着非常
广阔的应用前景 。 在西方发达国家 ,移动式自主服
务机器人已广泛应用于医疗福利服务 、商场超市服
务 、家庭服务等领域 ;AGV 在军事领域也有着重要
的应用价值 ,美国军方把部分机器人技术视为未来
战斗系 统 (Future Combat System ) 的 重 要 组 成 部
分
[1]
。 本文研究的智能小车主要采用专用赛道作
为使用环境 。 智能小车的实现主要是控制其移动
速度和方向 。 由路径识别 、电机驱动 、车速检测 、方
向舵机控制 、电源管理及控制策略等功能模块组
成
[2]
。
1 控制系统分析
智能小车为轮式结构 ,机械部分主要为转向机
械和驱动机械 。 转向机构主要由舵机 ,转向架和两
个前轮组成 。 舵机根据转向信号正向或反向旋转
一定角度 ;前轮为从动轮 ,会根据转向角度的大小
自动调节内外侧车轮的转速 ;驱动机构包括一个直
流电机 、减速装置和两个后轮 ,后轮为主动轮 ,其转
速大小由直流电机控制 。 智能小车的控制策略是
在稳定性的基础上 ,追求车速最高 。 小车在过 S 型
弯道时 ,根据不同路况 ,选择不同的控制策略 ,因
此 ,智能小车的控制系统在控制舵机转向的同时 ,
还需要根据转弯半径大小调节驱动电机转速 ,即自
动调节车速大小 ,从而顺利通过弯道 。
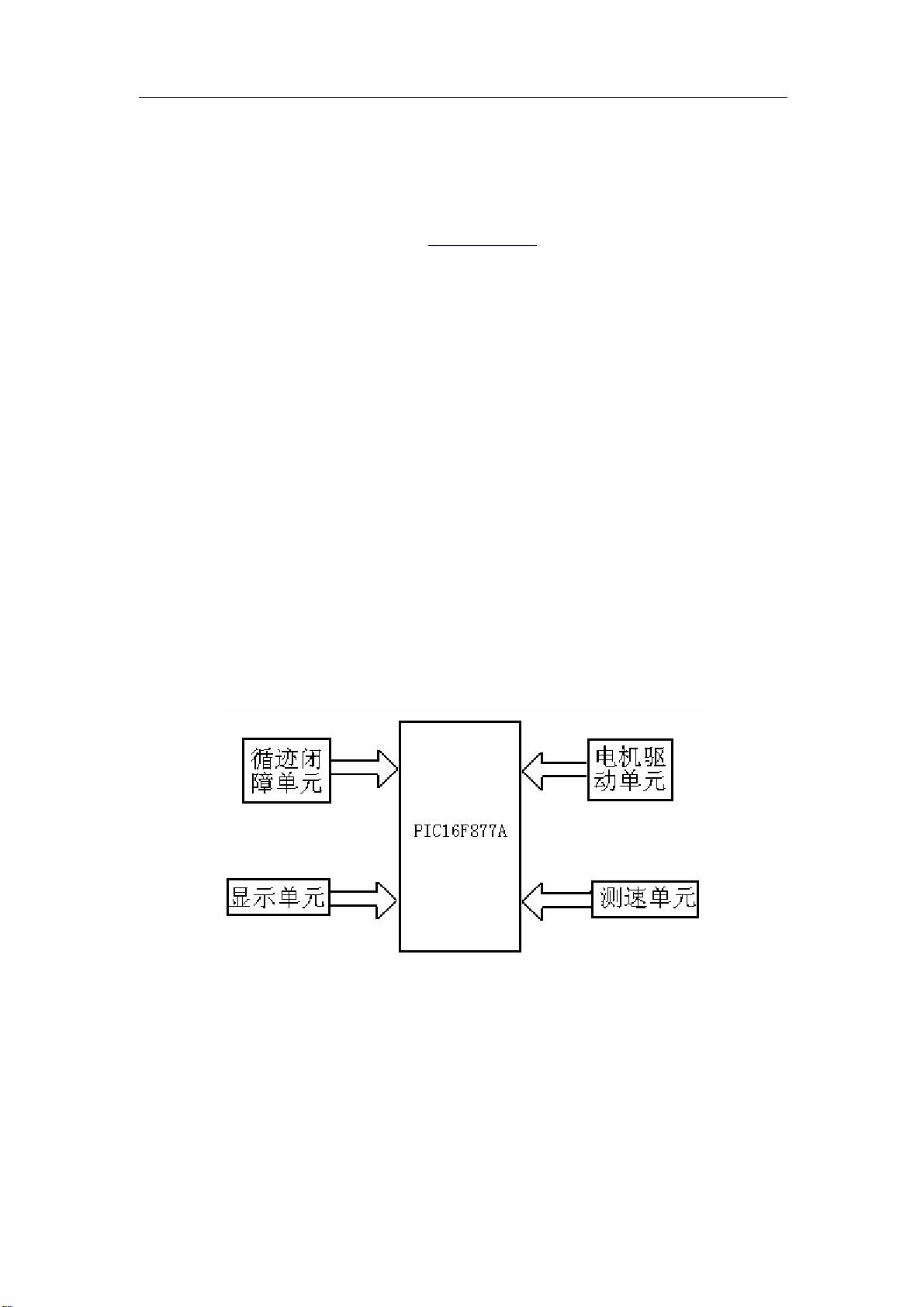
智能小车控制系统结构如图 1 所示 ,控制系统
以单片机 MC9S12DG128 为核心 ,由电源管理模块 、
CCD 摄像头传感器路径识别模块 、直流电机驱动模
块 、车速检测模块 ,键盘与显示模块 、舵机控制模块
等组成 。
图 1 控制系统结构框图
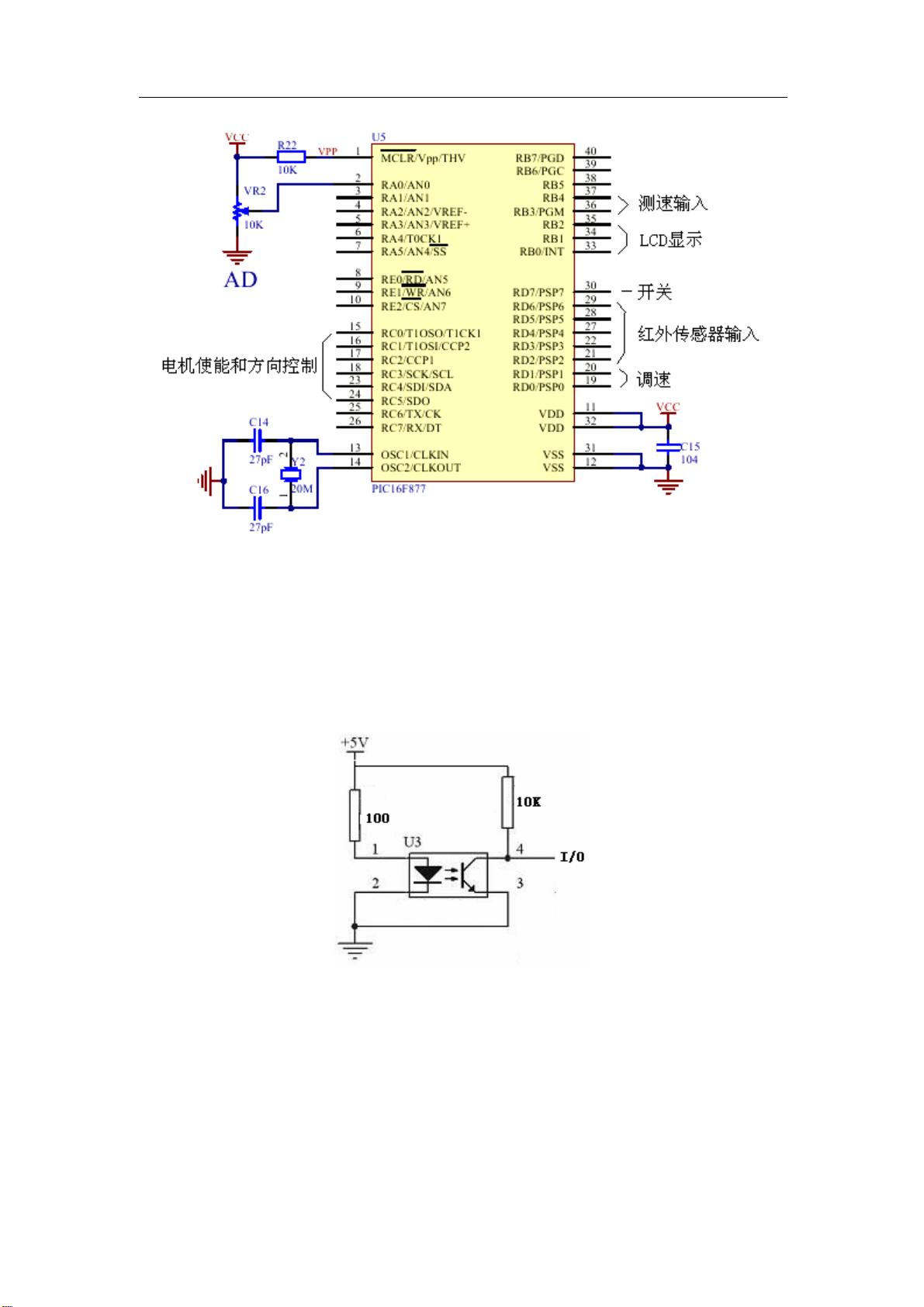
2 控制系统硬件电路设计
2 .1 控制系统核心
控制系统核心采用 Freescale 半导体公司的 16
位单片机 MC9S12DGl28 ,该单片机包含高速 A/D 、
PWM 、硬件看门狗 、电源监控 、内部集成 PLL 锁相
环等功能模块 。 采用上电自动复位方式 ,时钟频率
收稿日期 :2011 - 02 - 27
第一作者简介 : N葛广军(1974 - ) ,男 ,河南叶县人 ,河南城建学院电气系讲师 。
第 20 卷第 3 期
2011 年 5 月
河 南 城 建 学 院 学 报
Journal of Henan University of Urban Construction
Vol .20 No .3
May .2011