人体姿态估计论文(open pose)
需积分: 50 130 浏览量
2017-12-18
22:15:58
上传
评论 6
收藏 8.08MB PDF 举报

Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
∗
Zhe Cao Tomas Simon Shih-En Wei Yaser Sheikh
The Robotics Institute, Carnegie Mellon University
{zhecao,shihenw}@cmu.edu {tsimon,yaser}@cs.cmu.edu
Abstract
We present an approach to efficiently detect the 2D pose
of multiple people in an image. The approach uses a non-
parametric representation, which we refer to as Part Affinity
Fields (PAFs), to learn to associate body parts with individ-
uals in the image. The architecture encodes global con-
text, allowing a greedy bottom-up parsing step that main-
tains high accuracy while achieving realtime performance,
irrespective of the number of people in the image. The ar-
chitecture is designed to jointly learn part locations and
their association via two branches of the same sequential
prediction process. Our method placed first in the inaugu-
ral COCO 2016 keypoints challenge, and significantly ex-
ceeds the previous state-of-the-art result on the MPII Multi-
Person benchmark, both in performance and efficiency.
1. Introduction
Human 2D pose estimation—the problem of localizing
anatomical keypoints or “parts”—has largely focused on
finding body parts of individuals [8, 4, 3, 21, 33, 13, 25, 31,
6, 24]. Inferring the pose of multiple people in images, es-
pecially socially engaged individuals, presents a unique set
of challenges. First, each image may contain an unknown
number of people that can occur at any position or scale.
Second, interactions between people induce complex spa-
tial interference, due to contact, occlusion, and limb articu-
lations, making association of parts difficult. Third, runtime
complexity tends to grow with the number of people in the
image, making realtime performance a challenge.
A common approach [23, 9, 27, 12, 19] is to employ
a person detector and perform single-person pose estima-
tion for each detection. These top-down approaches di-
rectly leverage existing techniques for single-person pose
estimation [17, 31, 18, 28, 29, 7, 30, 5, 6, 20], but suffer
from early commitment: if the person detector fails–as it
is prone to do when people are in close proximity–there is
no recourse to recovery. Furthermore, the runtime of these
∗
Video result: https://youtu.be/pW6nZXeWlGM
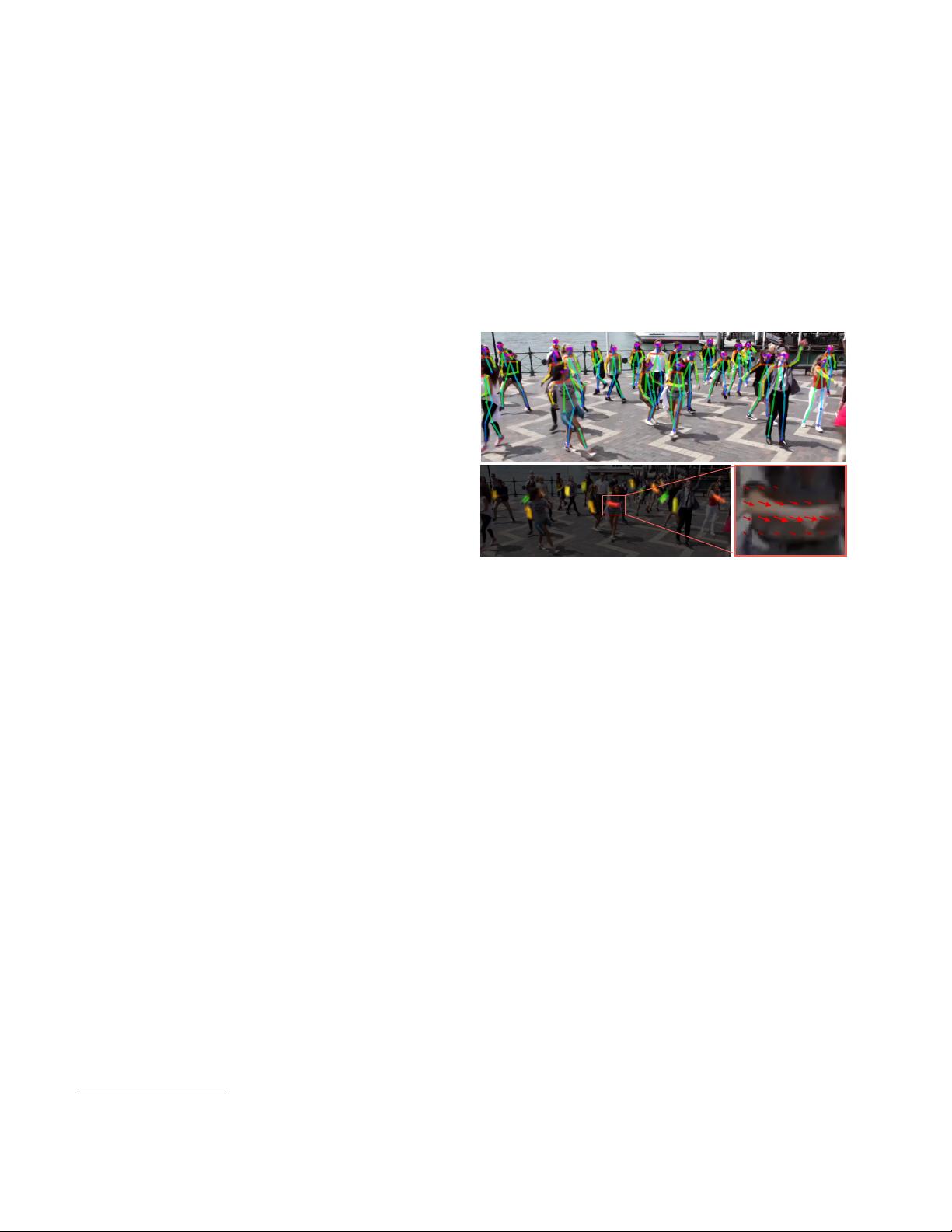
Figure 1. Top: Multi-person pose estimation. Body parts belong-
ing to the same person are linked. Bottom left: Part Affinity Fields
(PAFs) corresponding to the limb connecting right elbow and right
wrist. The color encodes orientation. Bottom right: A zoomed in
view of the predicted PAFs. At each pixel in the field, a 2D vector
encodes the position and orientation of the limbs.
top-down approaches is proportional to the number of peo-
ple: for each detection, a single-person pose estimator is
run, and the more people there are, the greater the computa-
tional cost. In contrast, bottom-up approaches are attractive
as they offer robustness to early commitment and have the
potential to decouple runtime complexity from the number
of people in the image. Yet, bottom-up approaches do not
directly use global contextual cues from other body parts
and other people. In practice, previous bottom-up meth-
ods [22, 11] do not retain the gains in efficiency as the fi-
nal parse requires costly global inference. For example, the
seminal work of Pishchulin et al. [22] proposed a bottom-up
approach that jointly labeled part detection candidates and
associated them to individual people. However, solving the
integer linear programming problem over a fully connected
graph is an NP-hard problem and the average processing
time is on the order of hours. Insafutdinov et al. [11] built
on [22] with stronger part detectors based on ResNet [10]
and image-dependent pairwise scores, and vastly improved
the runtime, but the method still takes several minutes per
image, with a limit on the number of part proposals. The
pairwise representations used in [11], are difficult to regress
precisely and thus a separate logistic regression is required.
1
arXiv:1611.08050v2 [cs.CV] 14 Apr 2017






评论0
最新资源