poisson reconstruction
需积分: 0 120 浏览量
2013-06-12
13:07:38
上传
评论 1
收藏 4.38MB PDF 举报

Eurographics Symposium on Geometry Processing (2006)
Konrad Polthier, Alla Sheffer (Editors)
Poisson Surface Reconstruction
Michael Kazhdan
1
, Matthew Bolitho
1
and Hugues Hoppe
2
1
Johns Hopkins University, Baltimore MD, USA
2
Microsoft Research, Redmond WA, USA
Abstract
We show that surface reconstruction from oriented points can be cast as a spatial Poisson problem. This Poisson
formulation considers all the points at once, without resorting to heuristic spatial partitioning or blending, and
is therefore highly resilient to data noise. Unlike radial basis function schemes, our Poisson approach allows a
hierarchy of locally supported basis functions, and therefore the solution reduces to a well conditioned sparse
linear system. We describe a spatially adaptive multiscale algorithm whose time and space complexities are pro-
portional to the size of the reconstructed model. Experimenting with publicly available scan data, we demonstrate
reconstruction of surfaces with greater detail than previously achievable.
1. Introduction
Reconstructing 3D surfaces from point samples is a well
studied problem in computer graphics. It allows fitting of
scanned data, filling of surface holes, and remeshing of ex-
isting models. We provide a novel approach that expresses
surface reconstruction as the solution to a Poisson equation.
Like much previous work (Section 2), we approach the
problem of surface reconstruction using an implicit function
framework. Specifically, like [Kaz05] we compute a 3D in-
dicator function
χ
(defined as 1 at points inside the model,
and 0 at points outside), and then obtain the reconstructed
surface by extracting an appropriate isosurface.
Our key insight is that there is an integral relationship be-
tween oriented points sampled from the surface of a model
and the indicator function of the model. Specifically, the gra-
dient of the indicator function is a vector field that is zero
almost everywhere (since the indicator function is constant
almost everywhere), except at points near the surface, where
it is equal to the inward surface normal. Thus, the oriented
point samples can be viewed as samples of the gradient of
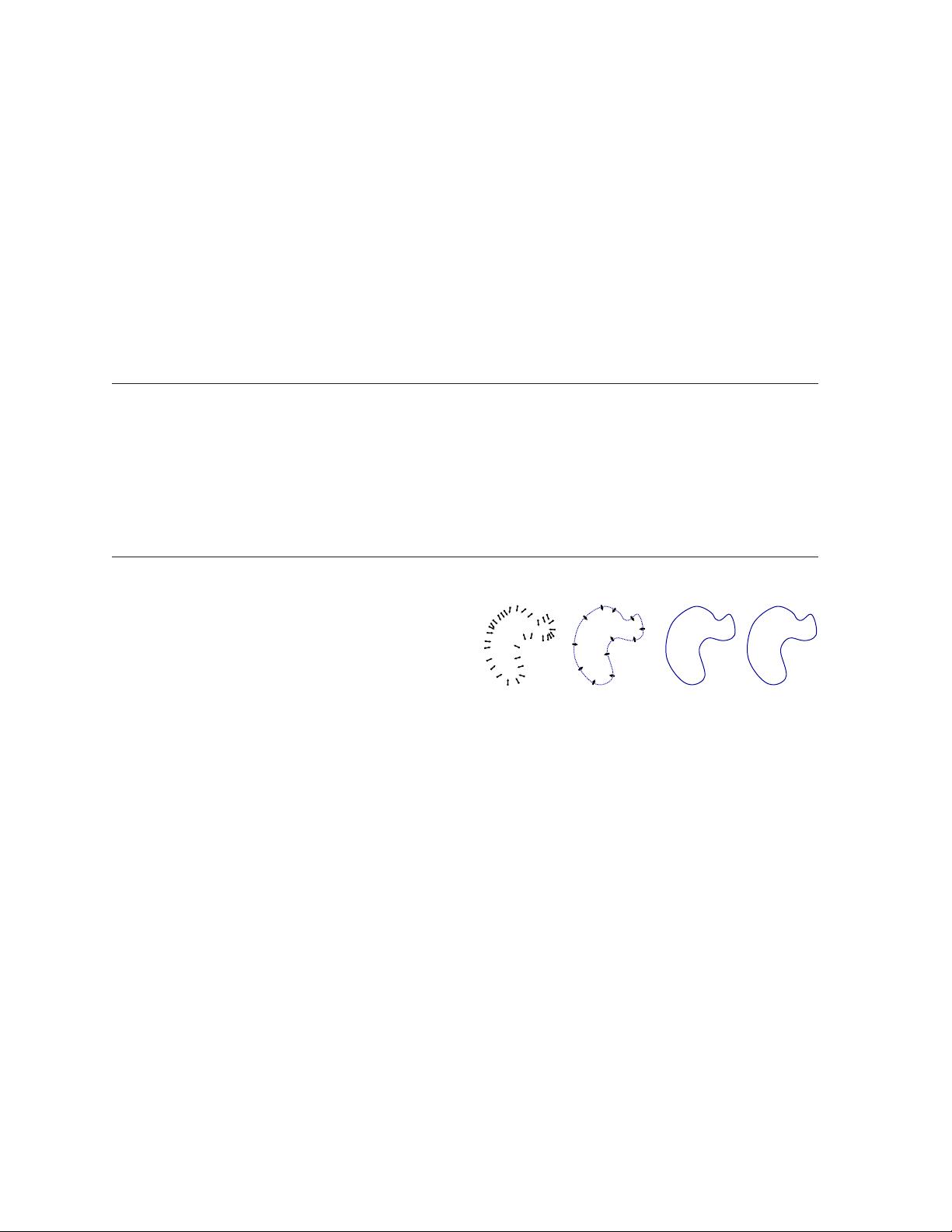
the model’s indicator function (Figure 1).
The problem of computing the indicator function thus re-
duces to inverting the gradient operator, i.e. finding the scalar
function
χ
whose gradient best approximates a vector field
V defined by the samples, i.e. min
χ
∇
χ
−
V . If we apply
the divergence operator, this variational problem transforms
into a standard Poisson problem: compute the scalar func-
1
1
1
0
0
F
M
0
0
0
0
0
1
1
1
0
Indicator function
F
M
Indicator gradient
0
0
0
0
0
0
Surface
wM
Oriented points
V
G
Figure 1: Intuitive illustration of Poisson reconstruction in 2D.
tion
χ
whose Laplacian (divergence of gradient) equals the
divergence of the vector field
V ,
∆
χ
≡ ∇ · ∇
χ
= ∇ ·
V .
We will make these definitions precise in Sections 3 and 4.
Formulating surface reconstruction as a Poisson problem
offers a number of advantages. Many implicit surface fitting
methods segment the data into regions for local fitting, and
further combine these local approximations using blending
functions. In contrast, Poisson reconstruction is a global so-
lution that considers all the data at once, without resorting
to heuristic partitioning or blending. Thus, like radial basis
function (RBF) approaches, Poisson reconstruction creates
very smooth surfaces that robustly approximate noisy data.
But, whereas ideal RBFs are globally supported and non-
decaying, the Poisson problem admits a hierarchy of locally
supported functions, and therefore its solution reduces to a
well-conditioned sparse linear system.
c
The Eurographics Association 2006.






评论0
最新资源