Neville Mogan
Associate Professor,
Department
of
Mechanical Engineering
and Laboratory for Manufacturing
and Productivity,
Massachusetts Institute of Technology,
Cambridge, Mass. 02139
Impedance
Control:
An
Approach
to Manipulation:
Part SI—Implementation
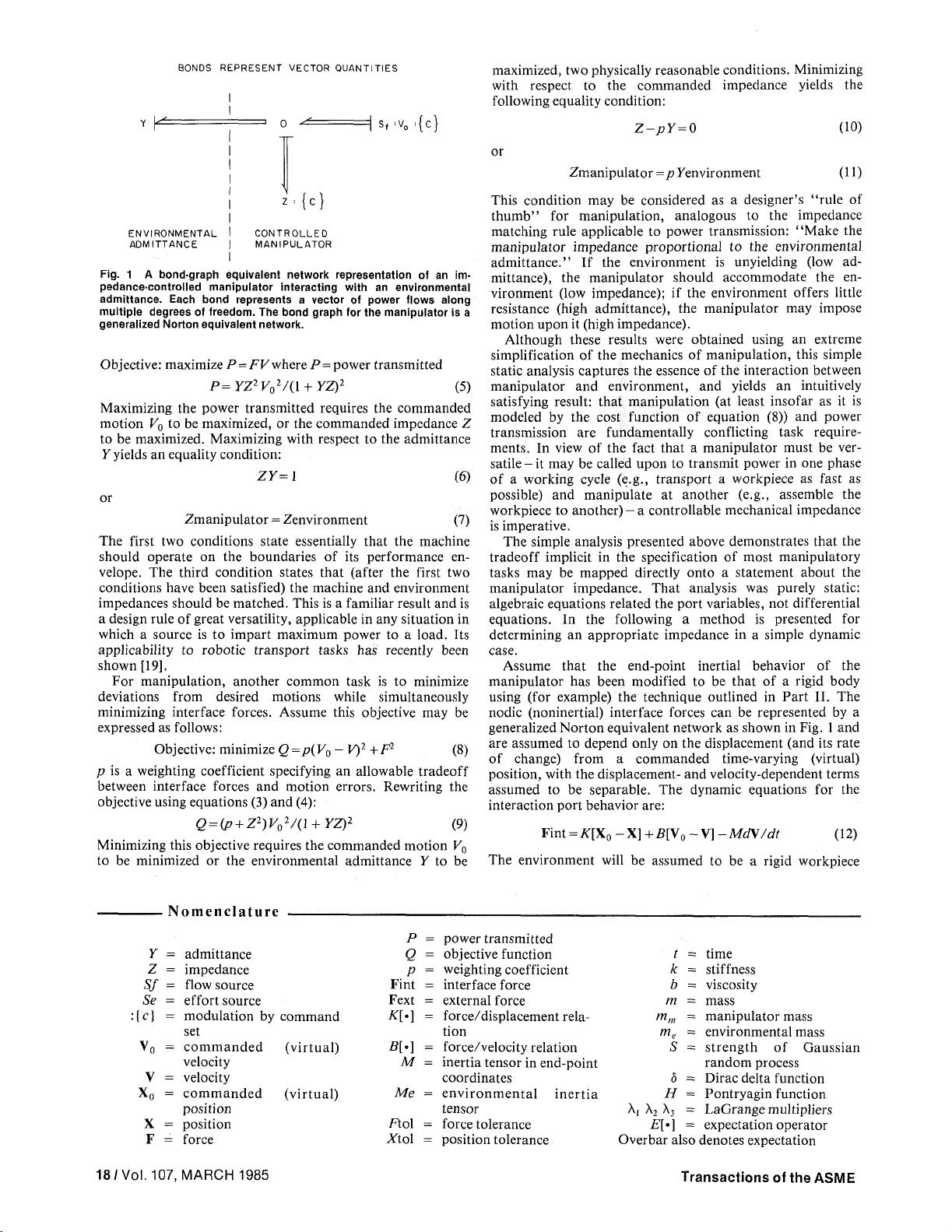
This three-part paper presents an approach to the control of dynamic interaction
between a manipulator and its environment. Part I presented the theoretical
reasoning behind impedance control. In Part II the implementation of impedance
control is considered. A feedback control algorithm for imposing a desired car-
tesian impedance on the end-point of a nonlinear manipulator is presented. This
algorithm completely eliminates the need to solve the "inverse kinematics problem"
in robot motion control. The modulation of end-point impedance without using
feedback control is also considered, and it is shown that apparently "redundant"
actuators and degrees of freedom such vs exist in the primate musculoskeletal
system may be used to modulate end-point impedance and may play an essential
functional role in the control of dynamic interaction.
Introduction
Most successful applications of industrial robots to date
have been based on position control, in which the robot is
treated essentially as an isolated system. However, many
practical tasks to be performed by an industrial robot or an
amputee with a prosthesis fundamentally require dynamic
interaction. The work presented in this three-part paper is an
attempt to define a unified approach to manipulation which is
sufficiently general to control manipulation under these
circumstances.
In Part I this approach was developed by starting with the
reasonable postulate that no controller can make the
manipulator appear to the environment as anything other
than a physical system. An important consequence of
dynamic interaction between two physical systems such as a
manipulator and its environment is that one must physically
complement the other: Along any degree of freedom, if one is
an impedance, the other must be an admittance and vice
versa.
One of the difficulties of controlling manipulation stems
from the fact that while the bulk of existing control theory
applies to linear systems, manipulation is a fundamentally
nonlinear problem. The familiar concepts of impedance and
admittance are usually applied to linear systems and regarded
as equivalent and interchangeable. As shown in Part I, for a
nonlinear system, the distinction between the two is fun-
damental.
Now, for almost all manipulatory tasks the environment at
least contains inertias and kinematic constraints, physical
systems which accept force inputs and which determine their
motion in response and are properly described as admittances.
When a manipulator is mechanically coupled to such an
Contributed by the Dynamic Systems and Control Division for publication in
the JOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL.
Manuscript
received by the Dynamic Systems and Control Division, June 1983.
environment, to ensure physical compatibility with the en-
vironmental admittance, something has to give, and the
manipulator should assume the behavior of an impedance.
Thus a general strategy for controlling a manipulator is to
control its motion (as in conventional robot control) and in
addition give it a "disturbance response" for deviations from
that motion which has the form of an impedance. The
dynamic interaction between manipulator and environment
may then be modulated, regulated, and controlled by
changing that impedance.
This second part of the paper presents some techniques for
controlling the impedance of a general nonlinear multiaxis
manipulator.
Implementation of Impedance Control
A distinction between impedance control and the more
conventional approaches to manipulator control is that the
controller attempts to implement a dynamic relation between
manipulator variables such as end-point position and force
rather than just control these variables alone. This change in
perspective results in a simplification of several control
problems.
Most of our work to date [3, 6, 13, 14, 16] has focused on
controlling the impedance of a manipulator as seen at its
"port of interaction" with the environment, its end effector.
A substantial body of literature has been published on
methods for implementing a planned end effector cartesian
path [5, 27, 28, 32, 34, 35]. The approach is widely used in the
control of industrial manipulators and there is some evidence
of a comparable strategy of motion control in biological
systems [1, 24]. Following the lead from this prior work we
have investigated ways of presenting the environment with a
dynamic behavior which is simple when expressed in
workspace (e.g., Cartesian) coordinates.
8/Vol. 107, MARCH 1985
Transactions of the ASME
Copyright © 1985 by ASME
Downloaded From: http://dynamicsystems.asmedigitalcollection.asme.org/ on 08/02/2013 Terms of Use: http://asme.org/terms