
3
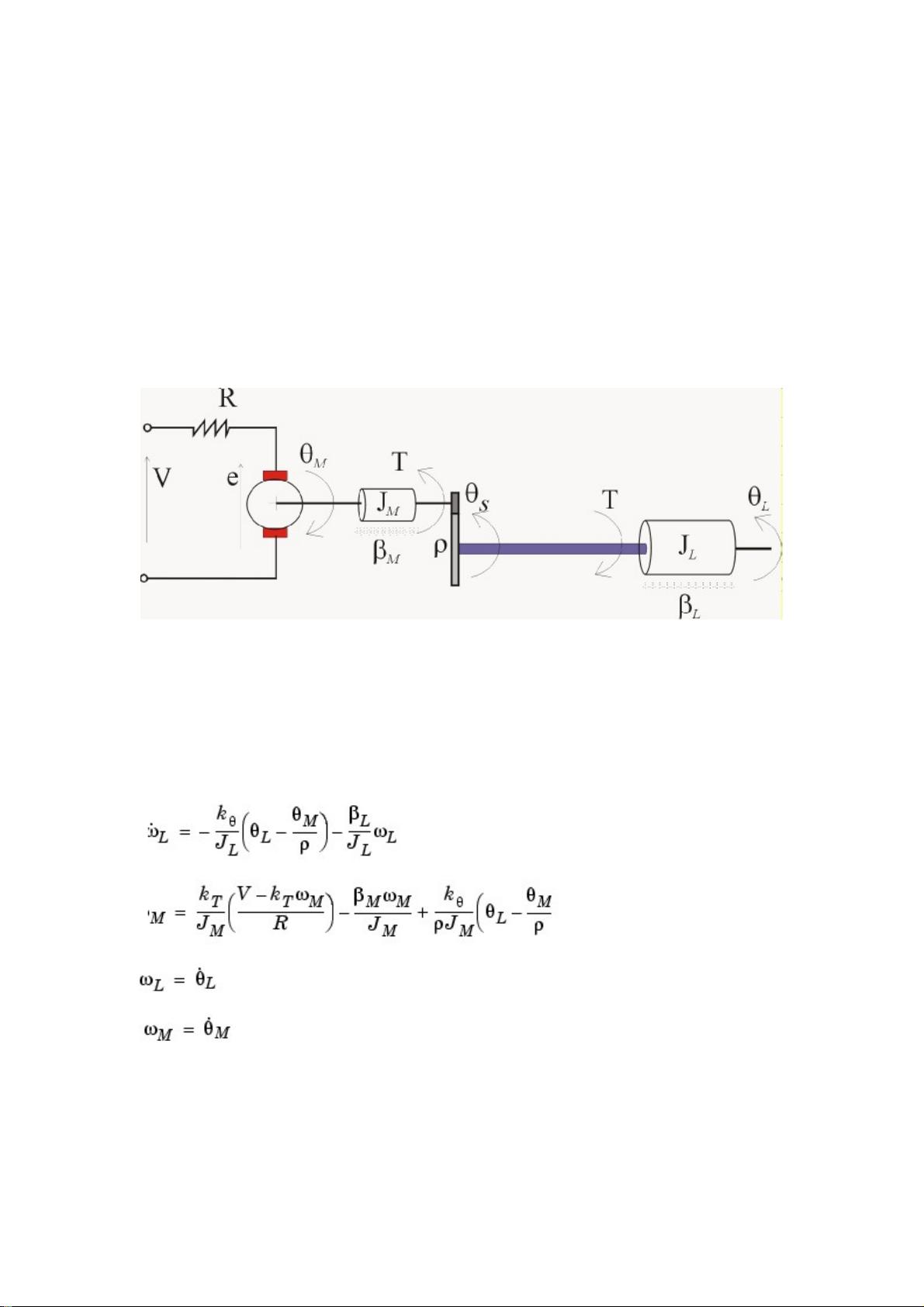
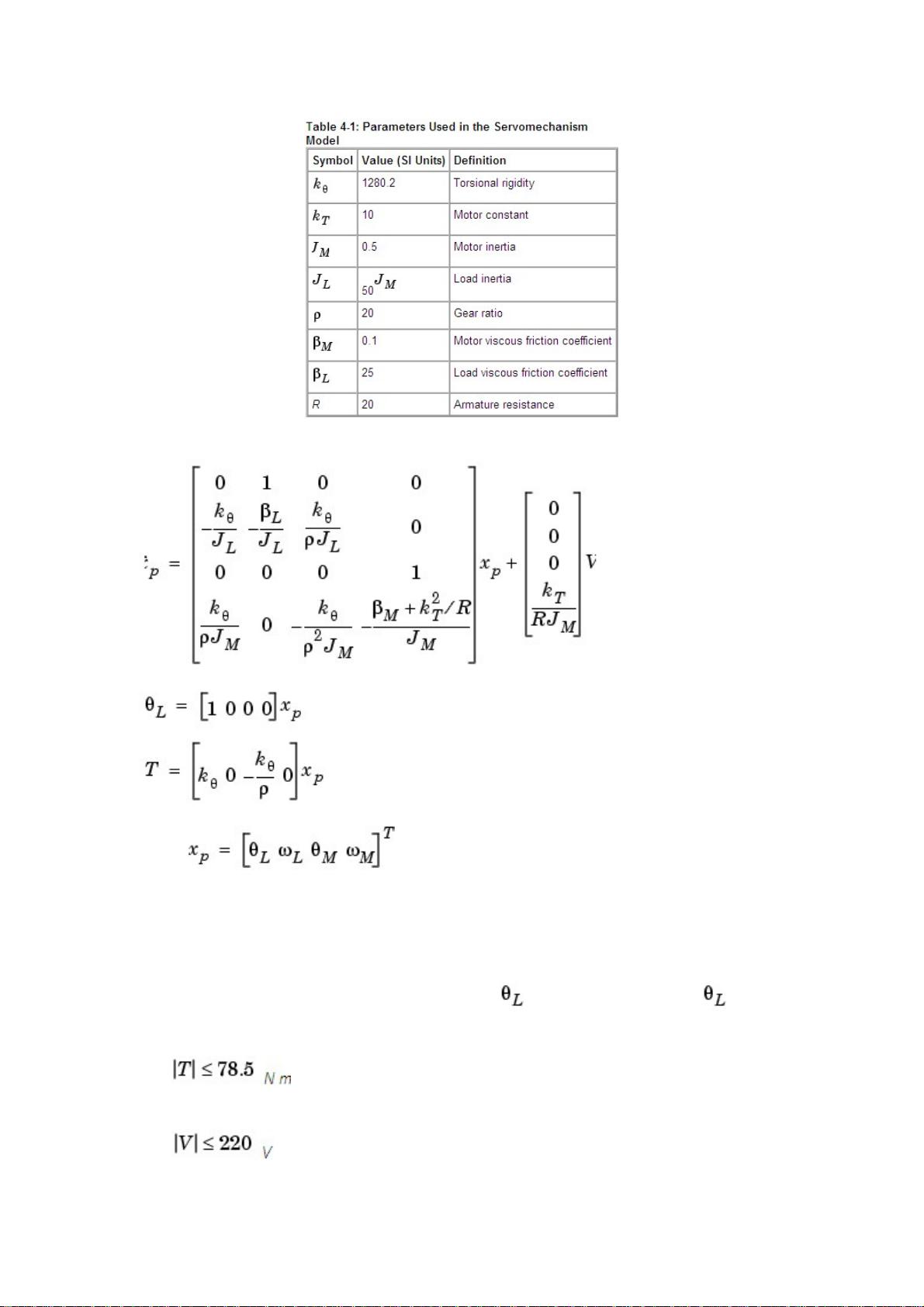
该系统有一个输入 V,两个输出: (可测量)和 T(不可测量)。
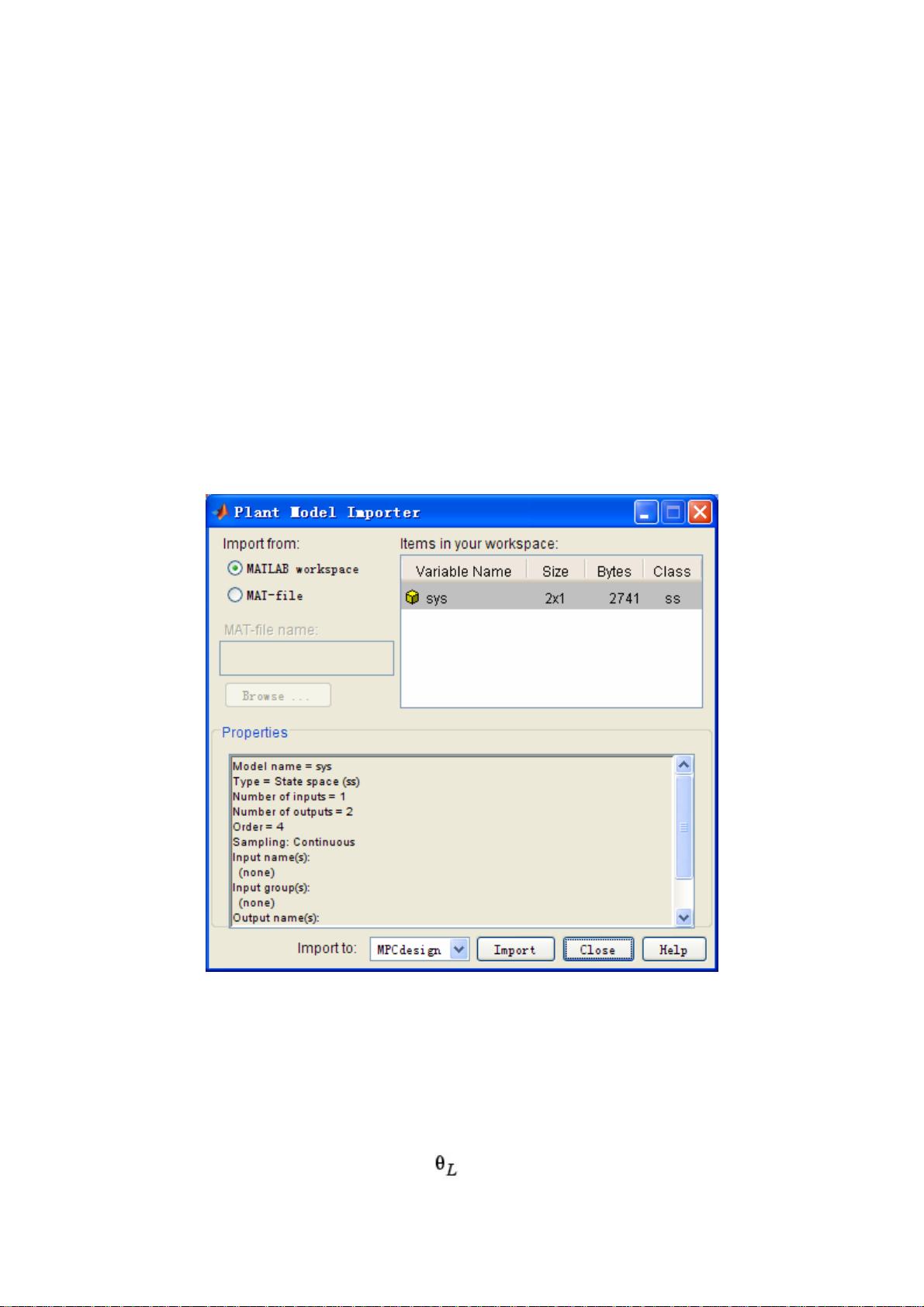
(3)在 matlab 中定义该系统的状态空间模型
首先需要在 matlab 中对系统的数学模型进行定义。可以直接在命令行输入
mpcmotormodel(建议做法),也可以在命令行中输入下列命令:
% DC-motor with elastic shaft
%
%Parameters (MKS)
%-----------------------------------------------------------
Lshaft=1.0; %Shaft length
dshaft=0.02; %Shaft diameter
shaftrho=7850; %Shaft specific weight (Carbon steel)
G=81500*1e6; %Modulus of rigidity
tauam=50*1e6; %Shear strength
Mmotor=100; %Rotor mass
Rmotor=.1; %Rotor radius
Jmotor=.5*Mmotor*Rmotor^2; %Rotor axial moment of inertia
Bmotor=0.1; %Rotor viscous friction coefficient (A CASO)
R=20; %Resistance of armature
Kt=10; %Motor constant
gear=20; %Gear ratio
Jload=50*Jmotor; %Load inertia
Bload=25; %Load viscous friction coefficient
Ip=pi/32*dshaft^4; %Polar momentum of shaft
(circular) section
Kth=G*Ip/Lshaft; %Torsional rigidity
(Torque/angle)
Vshaft=pi*(dshaft^2)/4*Lshaft; %Shaft volume
Mshaft=shaftrho*Vshaft; %Shaft mass
Jshaft=Mshaft*.5*(dshaft^2/4); %Shaft moment of inertia
JM=Jmotor;
JL=Jload+Jshaft;
Vmax=tauam*pi*dshaft^3/16; %Maximum admissible torque
Vmin=-Vmax;
%Input/State/Output continuous time form
%----------------------------------------------------------
AA=[0 1 0 0;
-Kth/JL -Bload/JL Kth/(gear*JL) 0;
0 0 0 1;
Kth/(JM*gear) 0 -Kth/(JM*gear^2)
-(Bmotor+Kt^2/R)/JM];








评论30
最新资源