PreScan罗技方向联合控制仿真教程

1
PreScan 逻辑方向盘联合仿真控制方法
1. PreScan GUI:在需要控制的车辆中加入车辆动力学模型
点中车辆,右击,object configuration -> dynamics -> 2D Simple
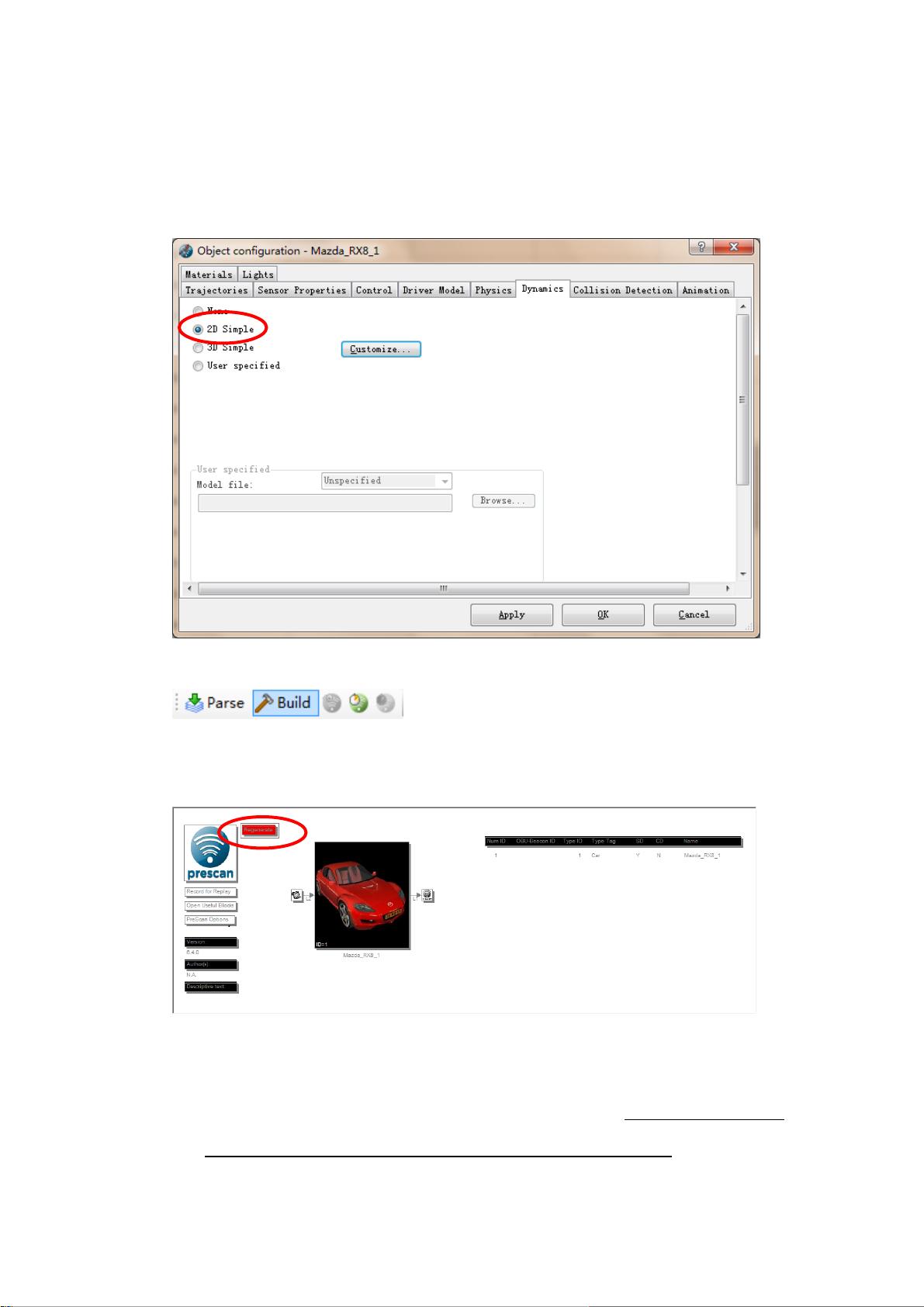
建立场景:build
2. Simulink 模型:
在同路径同文件夹下,打开对应的 simulink 模型(.mdl),regenerate
如上图所示,红色的 Mazda 为被控车辆,加入了车辆动力学模型,双击
得到如下带有车辆动力学模块的模型。车辆动力学模块输入为:steering
angle, throttle, V0, brake pressure, manual/auto shift。
其中
steering angle,
throttle, brake pressure
即作为和逻辑方向盘的接口参数。
资源评论

 大熊爷2019-01-08虽然只有3页
大熊爷2019-01-08虽然只有3页












