嵌入式系统Boot Loader 技术内幕
需积分: 10 111 浏览量
2015-05-21
10:28:27
上传
评论
收藏 38KB DOCX 举报


1. 引言
在专用的嵌入式板子运行 GNU/Linux 系统已经变得越来越流行。一个嵌入式 Linux 系统从
软件的角度看通常可以分为四个层次:
1. 引导加载程序。包括固化在固件(rmware)中的 boot 代码(可选),和 Boot Loader 两大部
分。
2. Linux 内核。特定于嵌入式板子的定制内核以及内核的启动参数。
3. 文件系统。包括根文件系统和建立于 Flash 内存设备之上文件系统。通常用 ram disk 来
作为 root fs。
4. 用户应用程序。特定于用户的应用程序。有时在用户应用程序和内核层之间可能还会包
括一个嵌入式图形用户界面。常用的嵌入式 GUI 有:MicroWindows 和 MiniGUI 懂。
引导加载程序是系统加电后运行的第一段软件代码。回忆一下 PC 的体系结构我们可以知
道,PC 机中的引导加载程序由 BIOS(其本质就是一段固件程序)和位于硬盘 MBR 中的 OS
Boot Loader(比如,LILO 和 GRUB 等)一起组成。BIOS 在完成硬件检测和资源分配后,将
硬盘 MBR 中的 Boot Loader 读到系统的 RAM 中,然后将控制权交给 OS Boot Loader。Boot
Loader 的主要运行任务就是将内核映象从硬盘上读到 RAM 中,然后跳转到内核的入口点去
运行,也即开始启动操作系统。
而在嵌入式系统中,通常并没有像 BIOS 那样的固件程序(注,有的嵌入式 CPU 也会内嵌
一段短小的启动程序),因此整个系统的加载启动任务就完全由 Boot Loader 来完成。比如
在 一 个 基于 ARM7TDMI core 的 嵌入式系 统 中 , 系 统 在 上电或复 位 时 通 常 都 从 地址
0x00000000 处开始执行,而在这个地址处安排的通常就是系统的 Boot Loader 程序。
本文将从 Boot Loader 的概念、Boot Loader 的主要任务、Boot Loader 的框架结构以及 Boot
Loader 的安装等四个方面来讨论嵌入式系统的 Boot Loader。
2. Boot Loader 的概念
简单地说,Boot Loader 就是在操作系统内核运行之前运行的一段小程序。通过这段小程序,
我们可以初始化硬件设备、建立内存空间的映射图,从而将系统的软硬件环境带到一个合
适的状态,以便为最终调用操作系统内核准备好正确的环境。
通常,Boot Loader 是严重地依赖于硬件而实现的,特别是在嵌入式世界。因此,在嵌入式
世界里建立一个通用的 Boot Loader 几乎是不可能的。尽管如此,我们仍然可以对 Boot
Loader 归纳出一些通用的概念来,以指导用户特定的 Boot Loader 设计与实现。
1. Boot Loader 所支持的 CPU 和嵌入式板
每种不同的 CPU 体系结构都有不同的 Boot Loader。有些 Boot Loader 也支持多种体系结构
的 CPU,比如 U-Boot 就同时支持 ARM 体系结构和 MIPS 体系结构。除了依赖于 CPU 的体
系结构外,Boot Loader 实际上也依赖于具体的嵌入式板级设备的配置。这也就是说,对于
两块不同的嵌入式板而言,即使它们是基于同一种 CPU 而构建的,要想让运行在一块板子
上的 Boot Loader 程序也能运行在另一块板子上,通常也都需要修改 Boot Loader 的源程序。
2. Boot Loader 的安装媒介(Installaon Medium)
系统加电或复位后,所有的 CPU 通常都从某个由 CPU 制造商预先安排的地址上取指令。比
如,基于 ARM7TDMI core 的 CPU 在复位时通常都从地址 0x00000000 取它的第一条指令。
而基于 CPU 构建的嵌入式系统通常都有某种类型的固态存储设备(比如:ROM、EEPROM 或
FLASH 等)被映射到这个预先安排的地址上。因此在系统加电后,CPU 将首先执行 Boot
Loader 程序。
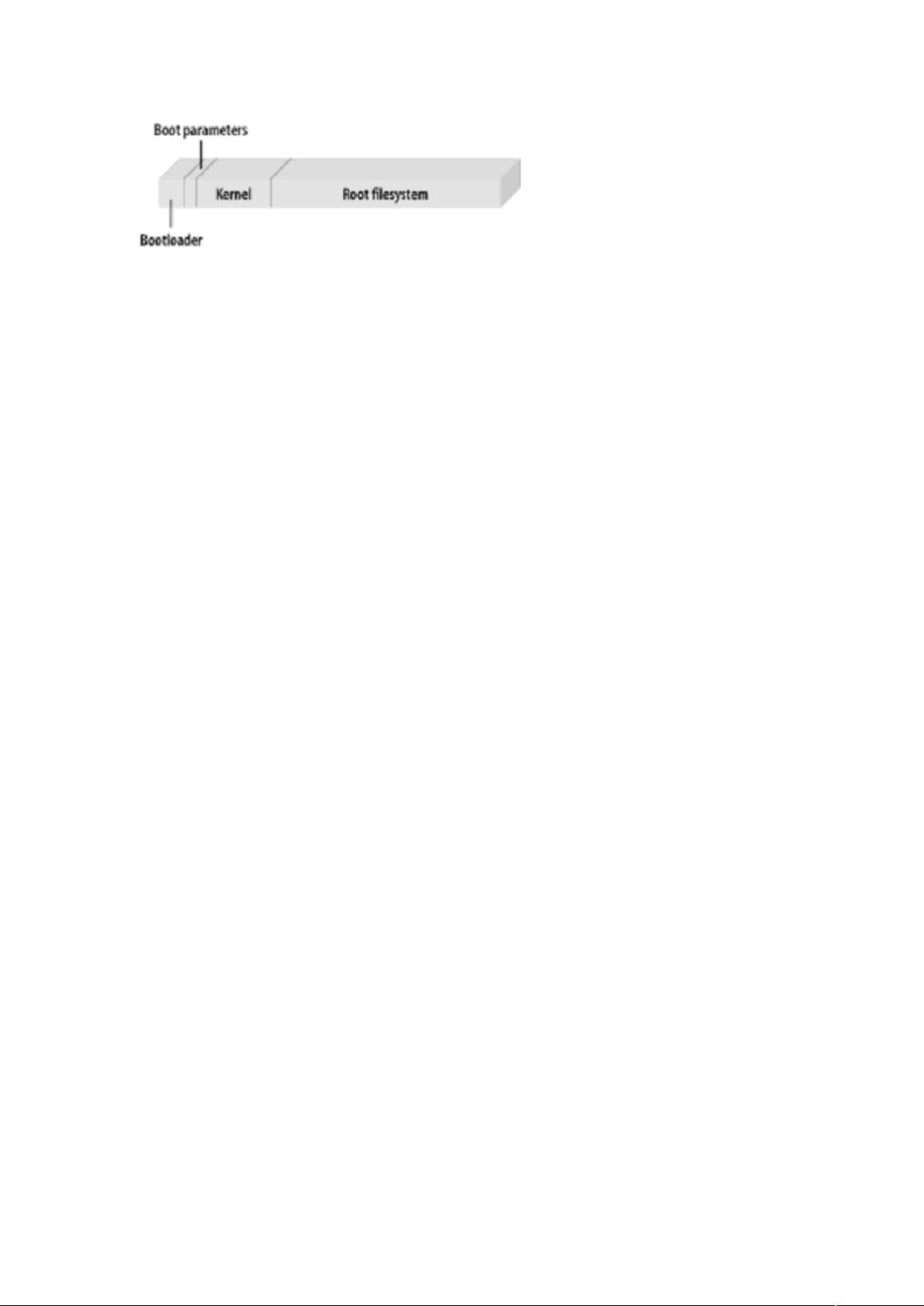
下图 1 就是一个同时装有 Boot Loader、内核的启动参数、内核映像和根文件系统映像的固
态存储设备的典型空间分配结构图。
图 1 固态存储设备的典型空间分配结构

剩余10页未读,继续阅读






评论0
最新资源